Eerste RTL
Woehoee!
Vandaag mijn eerste RTL geinitieerd en het ging perfect!")
Enige wat die nog doet is een beetje stuiteren op de grond, moet nog even kijken naar een oplossing hoe ik dit kan verbeteren. Nu wil ik alleen nog even testen hoe het in zijn werk gaat als mijn Zender uit valt, met een dry run springt hij in RTL ben er alleen nog een beetje huiverig voor om het te proberen in de lucht.
Na een hoop lezen en tunen ben ik héél erg tevreden met het resultaat en de setup ;
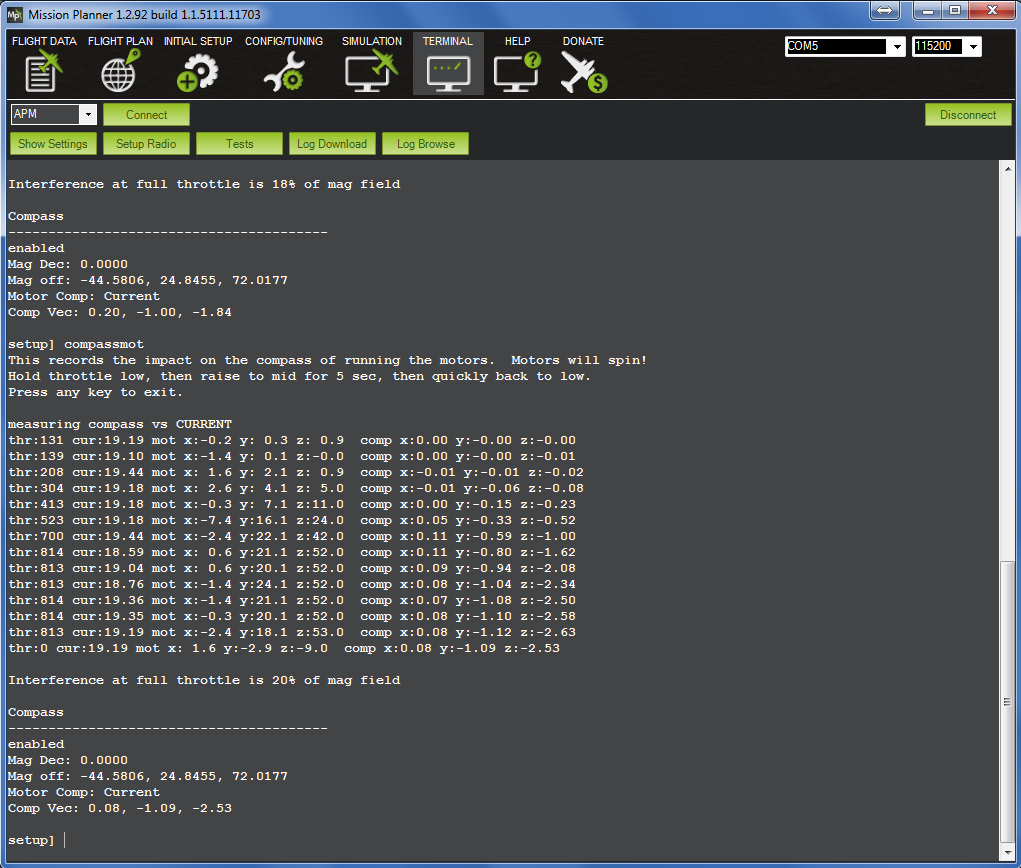
Compassmot
20% op 81% throttle
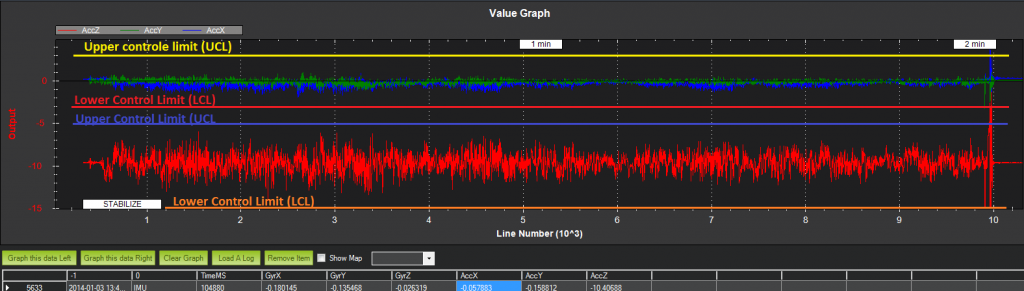
Vibrations in winderige conditie;
Alles ver binnen de Control limits, erg tevreden met het resultaat.
De X- en Y -assen zitten ruim tussen de -3 en +3 en de Z-as tussen de -15 en + -5. De Z-as zou van mij nog wel iets minder mogen.
Enige wat ik tussen mijn APM en het frame heb zitten is dubbelzijdige tape van tesa
Woehoee!
Vandaag mijn eerste RTL geinitieerd en het ging perfect!
Enige wat die nog doet is een beetje stuiteren op de grond, moet nog even kijken naar een oplossing hoe ik dit kan verbeteren. Nu wil ik alleen nog even testen hoe het in zijn werk gaat als mijn Zender uit valt, met een dry run springt hij in RTL ben er alleen nog een beetje huiverig voor om het te proberen in de lucht.
Na een hoop lezen en tunen ben ik héél erg tevreden met het resultaat en de setup ;
Compassmot
20% op 81% throttle

Vibrations in winderige conditie;
Alles ver binnen de Control limits, erg tevreden met het resultaat.
De X- en Y -assen zitten ruim tussen de -3 en +3 en de Z-as tussen de -15 en + -5. De Z-as zou van mij nog wel iets minder mogen.
Enige wat ik tussen mijn APM en het frame heb zitten is dubbelzijdige tape van tesa


")