Me gisteren bezig gehouden met de smeerpunten.
Mooi setje die opzetstukken , alleen kwam ik bij de kogelomloopmoeren niet goed bij de nippels. Met wat zagen, buigen en hardsolderen de opzetstukken wat aangepast.

Alles is nu gesmeerd. Helaas kan ik nog niet veel testen op de huidige tafel , want die is niet echt stabiel, die zwalkt alle kanten op met het accelereren en decceleren van de CNC-frees.
Wat ik nog ga doen vanmiddag is de lasers uitlijnen en gaten tapen voor de MDF plaat die ik misschien ook vanmiddag of anders morgen ga halen.
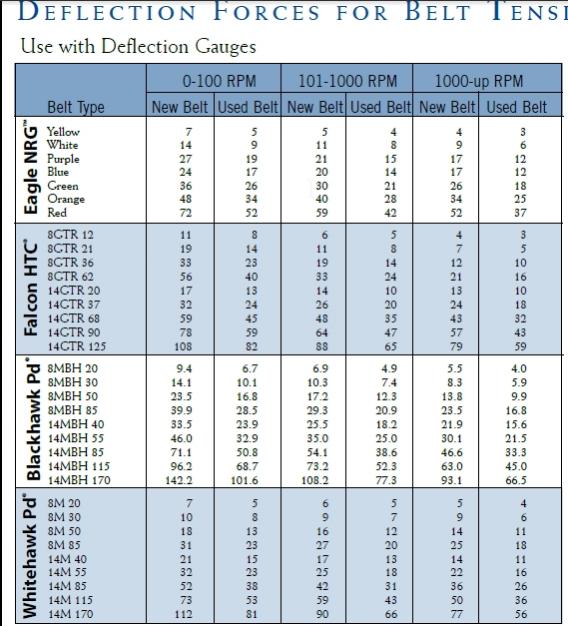
Nog een vraagje over de tandriemen , hoe strak ( of los) moeten die zijn? als die te strak of te los zijn , wat voor invloed heeft dat op de machine?
Cor
Mooi setje die opzetstukken , alleen kwam ik bij de kogelomloopmoeren niet goed bij de nippels. Met wat zagen, buigen en hardsolderen de opzetstukken wat aangepast.
Alles is nu gesmeerd. Helaas kan ik nog niet veel testen op de huidige tafel , want die is niet echt stabiel, die zwalkt alle kanten op met het accelereren en decceleren van de CNC-frees.
Wat ik nog ga doen vanmiddag is de lasers uitlijnen en gaten tapen voor de MDF plaat die ik misschien ook vanmiddag of anders morgen ga halen.
Nog een vraagje over de tandriemen , hoe strak ( of los) moeten die zijn? als die te strak of te los zijn , wat voor invloed heeft dat op de machine?
Cor
Laatst bewerkt door een moderator:


") en zelfs die slijten amper.
en zelfs die slijten amper.")