Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
De bouw van een snellere hellingzwever
- Topicstarter Berrie
- Startdatum

prop-er
Forum veteraan
Als je er ruimte voor hebt, en een geschikte servo, dan is het RDH systeem errug mooi:

https://plus.google.com/photos/108261435497421048134/albums/5638123957476776945?banner=pwa
Espadita
Benodigde accessoires zijn goed te verkrijgen:
RDH
RDH Servo Hub for MKS Servos
Sloperacer :: Hardware & Stuff
https://plus.google.com/photos/108261435497421048134/albums/5638123957476776945?banner=pwa
Espadita
Benodigde accessoires zijn goed te verkrijgen:
RDH
RDH Servo Hub for MKS Servos
Sloperacer :: Hardware & Stuff
Rick NL
PH-SAM
Ik stel mijn flap aansturing zo af dat de servo en hevel armpjes optimaal benut worden.
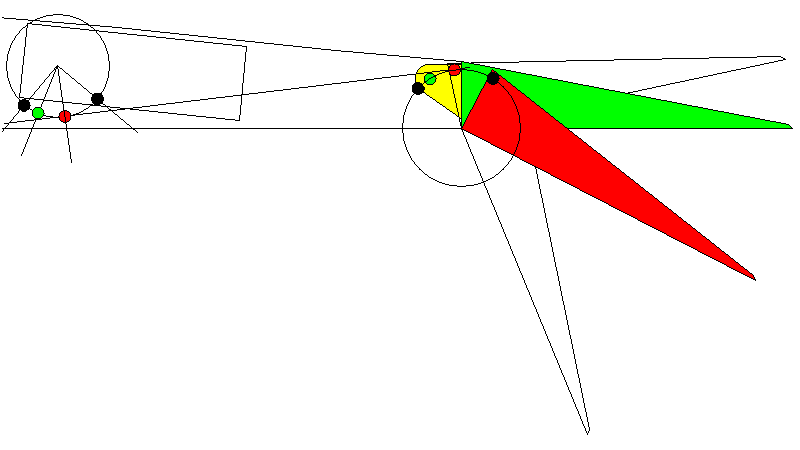
Eerst bepaal ik wat de uiterste standen van de flap moeten worden.
Dan bepaal ik de stand hier precies tussen in, de rode stand.
Op de draaicirkels van servo en hevel bepaal ik dan de plek waar het draaipunt moet zitten bij die halverwege stand.
De hoek die de lijn van dit draaipunt tot het draaipunt van servo maakt met de stuurstang wordt een rechte hoek. De rode punten.
Ik zet de servo electrisch in het midden, 1.5 msec. Dan monteer ik het servo armpje zo dat de hoek overeenkomt met die rode punt.
Je ziet dat wanneer het roer neutraal staat, groen, de servo niet neutraal staat.
Dit is ook van toepassing bij RDH systemen.
Bij een aansturing aan de bovenzijde is de werkwijze gelijk maar je moet dan even zelf een plaatje maken met alle hoeken.
Met deze instellingen gebruik je de gehele servoweg, en de effectieve hevelarm is optimaal.
Bij een conventioneel (niet RDS) rolroer werk ik het zelfde alleen is dan omdat de uitslag naar boven groter is de 'rode' stand wat naar boven.
Differentiatie breng ik aan via de zender. Dit is direkter te regelen dan mechanisch.
Rick
Eerst bepaal ik wat de uiterste standen van de flap moeten worden.
Dan bepaal ik de stand hier precies tussen in, de rode stand.
Op de draaicirkels van servo en hevel bepaal ik dan de plek waar het draaipunt moet zitten bij die halverwege stand.
De hoek die de lijn van dit draaipunt tot het draaipunt van servo maakt met de stuurstang wordt een rechte hoek. De rode punten.
Ik zet de servo electrisch in het midden, 1.5 msec. Dan monteer ik het servo armpje zo dat de hoek overeenkomt met die rode punt.
Je ziet dat wanneer het roer neutraal staat, groen, de servo niet neutraal staat.
Dit is ook van toepassing bij RDH systemen.
Bij een aansturing aan de bovenzijde is de werkwijze gelijk maar je moet dan even zelf een plaatje maken met alle hoeken.
Met deze instellingen gebruik je de gehele servoweg, en de effectieve hevelarm is optimaal.
Bij een conventioneel (niet RDS) rolroer werk ik het zelfde alleen is dan omdat de uitslag naar boven groter is de 'rode' stand wat naar boven.
Differentiatie breng ik aan via de zender. Dit is direkter te regelen dan mechanisch.
Rick
Laatst bewerkt door een moderator:
Gerben
Forum veteraan
Berrie,
als je roer aan de onderkant scharniert, wordt je rudderhorn erg lang bij een aansturing aan de onderzijde (De rudderhorn wordt de dikte van je roer 'langer').
Noramliter:
Onderkant scharnieren: bovenkant rudderhorn
Bovenkant scharnieren: onderkant rudderhorn.
Gerben
als je roer aan de onderkant scharniert, wordt je rudderhorn erg lang bij een aansturing aan de onderzijde (De rudderhorn wordt de dikte van je roer 'langer').
Noramliter:
Onderkant scharnieren: bovenkant rudderhorn
Bovenkant scharnieren: onderkant rudderhorn.
Gerben
Ik zie niet wat de krukas-constructie aan de servo anders is dan een kort roerhoorntje. Het mooie van het systeem is aan de flap-zijde, daar is geen roerhoorntje nodig.Als je er ruimte voor hebt, en een geschikte servo, dan is het RDH systeem errug mooi
Maar wat nu de meerwaarde van die krukas-achtige constructie is

prop-er
Forum veteraan
- Een stalen verbinding is stijver dan een nylon servo-armpje
- duurzame passing met geringe speling in de verbinding
Gezien de korte hevelarm geen overbodige luxe, maar een zelfbouwer zou misschien met wat tijd en aandacht op een andere manier een soortgelijk resultaat kunnen behalen.
Let ook op de horizontale, demontabele pen in het roer.
- duurzame passing met geringe speling in de verbinding
Gezien de korte hevelarm geen overbodige luxe, maar een zelfbouwer zou misschien met wat tijd en aandacht op een andere manier een soortgelijk resultaat kunnen behalen.
Let ook op de horizontale, demontabele pen in het roer.
DirkSchipper
Forum veteraan
Wat jij hier beschrijft is een zgn. mechanische differentiatie. Dat werkt in principe goed. Je krijgt de gewenste assymmetrische uitslagen. Maar er zit ook een nadeel aan: de resolutie en kracht van de uitslag wordt ook assymmetrisch. Die paar mm uitslag naar boven kent evenveel stapjes als de uitslag naar beneden (verondersteld dat je de gewenste differentiatie volledig mechasch hebt kunnen realiseren). Dat die 3-4 mm naar boven een hogere resolutie krijgt lijkt me idd. wenselijk. Maar, stel even 256 stapjes naar boven en 256 naar beneden, stel de uitslagen voor het gemak even op 4 mm omhoog en 40 mm naar beneden. Dan wordt 1 stap omhoog 4/256 mm (0,0156), en 1 stap omlaag 0,156 mm (ik veronderstel even lineaire beweging, verwaarloos het sinus-effect).Ik zet de servo electrisch in het midden, 1.5 msec. Dan monteer ik het servo armpje zo dat de hoek overeenkomt met die rode punt.
Je ziet dat wanneer het roer neutraal staat, groen, de servo niet neutraal staat.
Dit zorgt er ook voor dat de beschikbare kracht voor een uitslag naar beneden 10x kleiner is dan voor de uitslag omhoog. Terwijl ik dat eerder andersom zou wensen.
Mijn suggestie: het servo-midden elektronisch verplaatsen (zonder verandering van de einpunten) betekent dat de resolutie naar boven en beneden gelijk blijft, en de beschikbare kracht ook.
Waarschijnlijk is een combinatie van beide de beste oplossing. Want bij uitslag omhoog vlieg je meestal sneller, en is dus iets meer kracht en resolutie gewenst om flutter te voorkomen.
Waarschijnlijk bedoel je: als scharnier aan de bovenkant zit en ruderhorn onder (of schanier onder en ruderhorn boven). In die gevallen wordt de ruderhornlengte vergroot met de dikte van het roer.Berrie,
als je roer aan de onderkant scharniert, wordt je rudderhorn erg lang bij een aansturing aan de onderzijde (De rudderhorn wordt de dikte van je roer 'langer').
Noramliter:
Onderkant scharnieren: bovenkant rudderhorn
Bovenkant scharnieren: onderkant rudderhorn.
Gerben
Bij zo'n diagonale aansluiting: servo armpje naar beneden en ruderhorn omhoog (of beide andersom), kom je in de problemen als de servo-arm richting vleugelneus gaat. Met een gewone kwiklink komt 1 deel tegen de servo-as. Vaak zie je dan als oplossing dat er een hap uit de kwik-link wordt weggeslepen. Maar bij de extreem korte armpjes bij dit soort aansturing is dat vaak nog niet genoeg. Bij die krukas-oplossing zit er daar geen (servo)as in de weg ...Ik zie niet wat de krukas-constructie aan de servo anders is dan een kort roerhoorntje. Het mooie van het systeem is aan de flap-zijde, daar is geen roerhoorntje nodig.
Maar wat nu de meerwaarde van die krukas-achtige constructie is
Rick NL
PH-SAM
Wat jij hier beschrijft is een zgn. mechanische differentiatie. Dat werkt in principe goed. Je krijgt de gewenste assymmetrische uitslagen. Maar er zit ook een nadeel aan: de resolutie en kracht van de uitslag wordt ook assymmetrisch. Die paar mm uitslag naar boven kent evenveel stapjes als de uitslag naar beneden (verondersteld dat je de gewenste differentiatie volledig mechasch hebt kunnen realiseren). Dat die 3-4 mm naar boven een hogere resolutie krijgt lijkt me idd. wenselijk. Maar, stel even 256 stapjes naar boven en 256 naar beneden, stel de uitslagen voor het gemak even op 4 mm omhoog en 40 mm naar beneden. Dan wordt 1 stap omhoog 4/256 mm (0,0156), en 1 stap omlaag 0,156 mm (ik veronderstel even lineaire beweging, verwaarloos het sinus-effect).
Dit zorgt er ook voor dat de beschikbare kracht voor een uitslag naar beneden 10x kleiner is dan voor de uitslag omhoog. Terwijl ik dat eerder andersom zou wensen.
Misschien is het je niet duidelijk dat bij de neutraalstand van het zender signaal, 1.5 msec dus, het roer in de rode gedeeltelijk naar beneden uitgeslagen positie staat, midden tussen de uiterste standen van zowel het roer als de servo. Van daaruit gaan de uitslagen symmetrisch omhoog en omlaag.
De door mij geschetste methode levert geen merkbare differentiatie.
Doordat de arm en de uitslag van servo en roer vrijwel gelijk zijn bij een flap, is met deze geometrie de overbrenging ook vrijwel lineair.
Wanneer je dit met de hand of in matlab uitzet zul je dit merken, maar ook op het plaatje zie je dat de afstanden tussen de overeenkomstige zwarte rode en groene punten in de richtng van de stootstang vrijwel gelijk zijn.
De geschetste metode levert een constante en optimale overbrenging.
Het RDH systeem heeft twee aspekten.
1. De hevel aan servo en roer zitten tegenovergesteld, de stootstang gaat dan dwars door de vleugel. Hiermee wordt he makelijker om alles binnenboord te houden of op zijn minst de stootstang/roerhorntje weinig uit te laten steken.
2. Door de constructie van het RDH systeem wordt de stootstang symmetrisch belast waardoor de krachten veel meer in 1 lijn zijn. Verder is de stijfheid van de lageringen groter dan met conventionele horntjes en quicklinks mogelijk is.
Je kan dan met kortere hevelarmen op servo en roer toch redelijk spelingsvrij werken. Wel moeten de draaias van servo en roer goed parallel zijn anders gaat het wringen.
Rick
@ Rick, bedankt voor je uitgebreide antwoord.
De truuk is dus, als ik het goed begrijp:
uiterste stand boven
uiterste stand beneden
Middenstand voor servo en flap: hoeken tussen de stootstang en hevels 90°.
Electronisch de servo daarna op flapneutraal stellen.
Ja, dat is duidelijk!
@ Vincent, dat RDH is wel een net systeem, maar gaan we niet toepassen. Of Dennis moet het opeens op z'n heupen krijgen") .
.
Mannen bedankt voor het mee denken!
De truuk is dus, als ik het goed begrijp:
uiterste stand boven
uiterste stand beneden
Middenstand voor servo en flap: hoeken tussen de stootstang en hevels 90°.
Electronisch de servo daarna op flapneutraal stellen.
als je roer aan de onderkant scharniert, wordt je rudderhorn erg lang bij een aansturing aan de onderzijde (De rudderhorn wordt de dikte van je roer 'langer').
Ja, dat is duidelijk!
@ Vincent, dat RDH is wel een net systeem, maar gaan we niet toepassen. Of Dennis moet het opeens op z'n heupen krijgen
. Mannen bedankt voor het mee denken!
DirkSchipper
Forum veteraan
Idd. dat was me niet duidelijk.Misschien is het je niet duidelijk dat bij de neutraalstand van het zender signaal, 1.5 msec dus, het roer in de rode gedeeltelijk naar beneden uitgeslagen positie staat, midden tussen de uiterste standen van zowel het roer als de servo. Van daaruit gaan de uitslagen symmetrisch omhoog en omlaag.
Maar dat betekent dat jij dus moet trimmen (de middenstand van de servo moet aanpassen) om het roer neutraal te zetten. Dan doe je toch precies hetzelfde als wat ik beschreef?


Rick NL
PH-SAM
Idd. dat was me niet duidelijk.
Maar dat betekent dat jij dus moet trimmen (de middenstand van de servo moet aanpassen) om het roer neutraal te zetten. Dan doe je toch precies hetzelfde als wat ik beschreef?
Het is wat je trimmen noemt. :twisted:
Ik zorg ervoor dat het roer neutraal staat (groen) met de flap knuppel helemaal omhoog en beneden staat met de flapknuppel omlaag.
Ik zorg ervoor dat ik bij flap omhoog (neutraal dus) nog niet aan het uiterste van de servoweg (lees: ook pulslengte) zodat ik nog wat rol en snapflap bij kan mixen.
In de onderste stand heb ik geen speelruimte meer zodat de flap bij rolmixing niet te ver door gaat.
Al de stuur en mix functies zijn lineair tot dat ik eventueel electronisch differentiaal of andere a-symmetrie inbreng.
Ik gebruik de monitor en andere visualisatie op mijn MPX RoyalPro uitbundig om te checken of ik alle bereiken goed, dus vrijwel vol, gebruik.
Rick
DirkSchipper
Forum veteraan
Trimmen, (what's in a name) is het verstellen van de midden- of neutraalstand van 1 (of meer) servo('s). Dat is, wat jij en ik, in heeeeel verschillende bewoordingen beschreven. Toch?Het is wat je trimmen noemt. :twisted:
....
Ik zorg ervoor dat ik bij flap omhoog (neutraal dus) nog niet aan het uiterste van de servoweg (lees: ook pulslengte) zodat ik nog wat rol en snapflap bij kan mixen.
Rick NL
PH-SAM
Trimmen, (what's in a name) is het verstellen van de midden- of neutraalstand van 1 (of meer) servo('s). Dat is, wat jij en ik, in heeeeel verschillende bewoordingen beschreven. Toch?
Zonder in woordspelletjes te verzanden klopt de definitie, waarbij nog kan worden onderscheiden of de eindstanden meelopen met de trim of niet.
Maar in mijn opzet gebruik ik de trim niet om de neutraalstand of middenstand van de servo aan te passen.
Ik gebruik hooguit een klein beetje trim om de neutraalstand van de flap aan te passen bij vol flap up. Dit full flap up is niet de servo middenstand maar ligt vrij dicht bij de servo eindstand in de richting van up.
Rick
DirkSchipper
Forum veteraan
Ik wilde ook geen woordspelletje spelen. Het is precies wat ik bedoelde ...
En weer verder:
We hebben een "saai" traject achter ons. Het begint vorm aan te nemen, al zijn we er nog niet.
Ik wilde de aansturing van de V-staart IN de staartboom weg frotten. Dat is niet gelukt. Ik ben veels te lang aan het klooien geweest, maar ja, wat geeft dat eigenlijk. De staart voor Dennis zijn zwever is passend:

Alle vleugeldelen zijn gebagged, wat voor mijn vleugel samen gebouwd het volgende te zien laat:


Ik maak er toch maar RDS in. 4 setjes klaar om de laatste dingetjes aan te doen voordat het de vleugels in kan:

Grootste hobbel die we nog moeten nemen is het maken van de rompmal.
We hebben een "saai" traject achter ons. Het begint vorm aan te nemen, al zijn we er nog niet.
Ik wilde de aansturing van de V-staart IN de staartboom weg frotten. Dat is niet gelukt. Ik ben veels te lang aan het klooien geweest, maar ja, wat geeft dat eigenlijk. De staart voor Dennis zijn zwever is passend:
Alle vleugeldelen zijn gebagged, wat voor mijn vleugel samen gebouwd het volgende te zien laat:
Ik maak er toch maar RDS in. 4 setjes klaar om de laatste dingetjes aan te doen voordat het de vleugels in kan:
Grootste hobbel die we nog moeten nemen is het maken van de rompmal.
Het eind komt in zicht!!
De staarten zijn klaar! RDS zit, nog wel los, in de vleugel.
Even nog een check gedaan mbt tot romplengte en zwaartepunt van staart/staartboom. Doel van die actie: romplengte op papier vast stellen (lees: gericht gokken) zodat zonder lood de onderdelen daar zitten waar ik ze wil hebben.
Vlieggewicht lijkt ergens tussen de 1400 en 1500 gram uit te gaan komen.
Het kersje op de taart is toch wel de vol carbon prop + spinner:

En, als je met een beetje fantasie tussen je wimpers door kijkt zie je hem al klaar liggen voor de maiden!

De staarten zijn klaar! RDS zit, nog wel los, in de vleugel.
Even nog een check gedaan mbt tot romplengte en zwaartepunt van staart/staartboom. Doel van die actie: romplengte op papier vast stellen (lees: gericht gokken) zodat zonder lood de onderdelen daar zitten waar ik ze wil hebben.
Vlieggewicht lijkt ergens tussen de 1400 en 1500 gram uit te gaan komen.
Het kersje op de taart is toch wel de vol carbon prop + spinner:
En, als je met een beetje fantasie tussen je wimpers door kijkt zie je hem al klaar liggen voor de maiden!
F
fireforx309
Guest
alleen het rompje mist nog als ik het goed voor heb?
als dat zo strak wordt als de rest, dan mag het van mij nog wat tijd beslaan... knap toestel is het... eerst was ik wat bevreest voor de kleur, maar uiteindelijk lijkt de combinatie wel erg strak!
als dat zo strak wordt als de rest, dan mag het van mij nog wat tijd beslaan... knap toestel is het... eerst was ik wat bevreest voor de kleur, maar uiteindelijk lijkt de combinatie wel erg strak!
. eerst was ik wat bevreest voor de kleur, maar uiteindelijk lijkt de combinatie wel erg strak!
Misschien is het verwarrend voor je dat er verschillende kleuren voorbij komen. Ik realiseer me dat je nog nergens een foto van de staart voor mijn uitvoering hebt kunnen zien.
De Skyfall voor Dennis wordt een sjieke uitvoering in carbon + grijs.
Mijn Skyfall wordt carbon + wit/rood. Dat wit/rood is zo'n beetje mijn vlootkleur aan het worden.
En, bedankt voor je compliment
")