dataset Tjarko 15.5 KRPM
 Zo hier is de volgende bak data.
Zo hier is de volgende bak data.
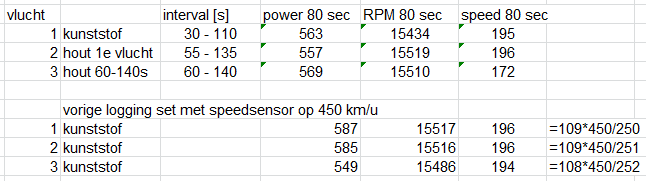
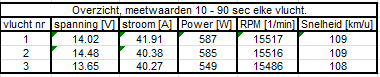
Een goede vlucht is 14.5V / 40 A / 585 W / 15516 RPM (16 te veel) en 109 km/u gemiddeld.
Die snelheid kan natuurlijk niet, foutje in de unilog settings 250 km/u range i.p.v. 450 km/u. Dat moet opnieuw.
Met een oude, maar warme accu, die onder de benodigde governer spanning zakt, toch nog 549 W en 108 km/u.
Ik denk dat 15.000 RPM echt genoeg is. Anders moet je nog steeds behoorlijk goede accu's hebben en op 40C verwarmd.
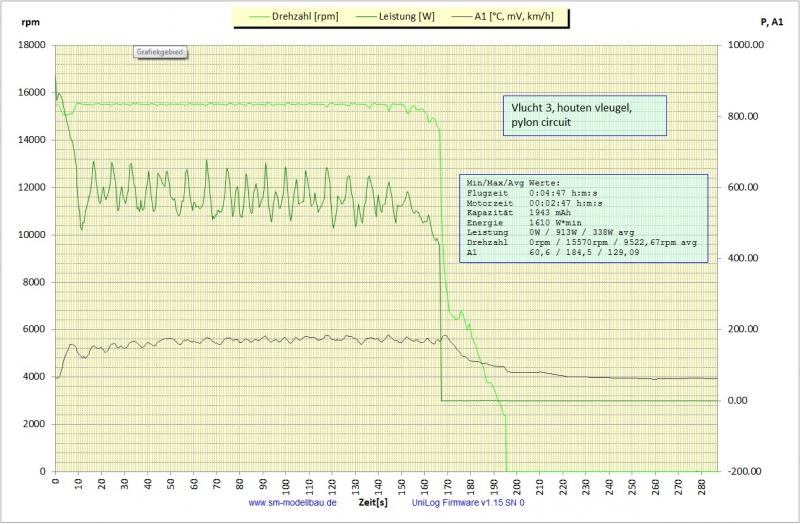
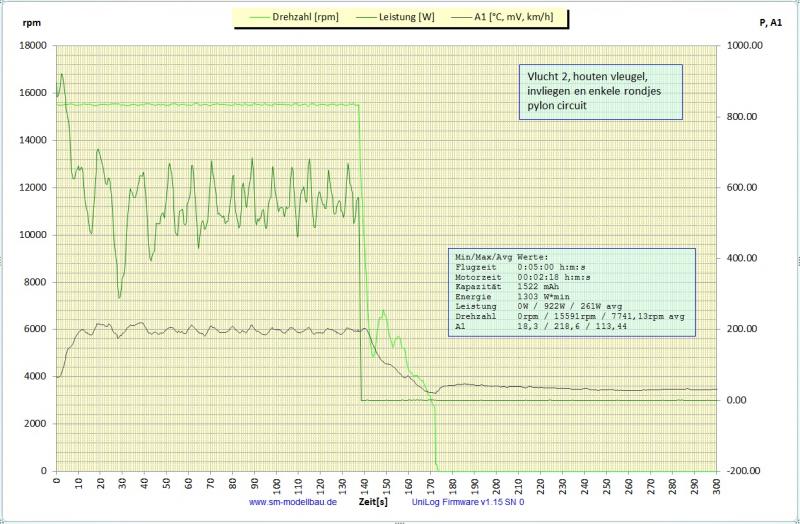
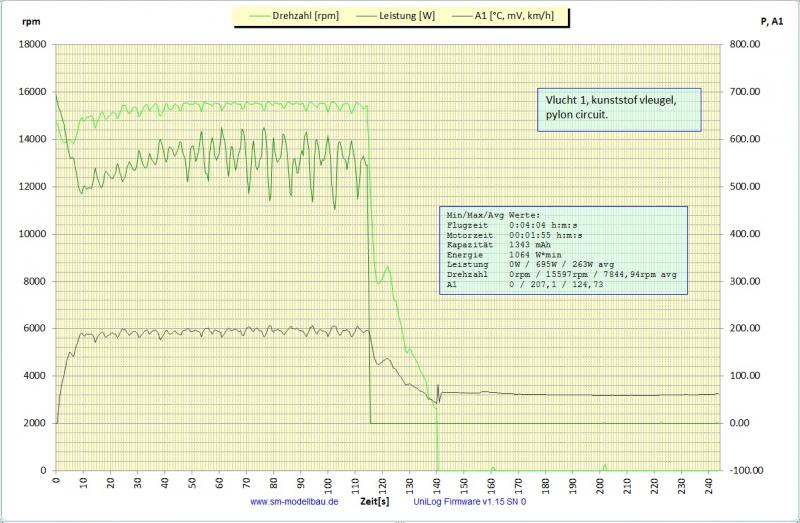
In detail de volgende plaatjes.





Al met al werkt het wel prima.
Optoeren is ca 2 seconden, dus startbord goed in de gaten houden, bij 5 vol gas geven. (Koude handen vandaag).
Je kunt bij het landen niet meer even gas bijgeven, duurt ook 2 seconden. Maar dead stick is ook prima. Even wennen.
De Talon 90 had ik in m'n 2e kist zitten nog geen logging, maar wel 1 vlucht gemaakt. Gaat hetzelfde. De regelaar was nog koud bij de landing . Niet vreemd bij 40 A.
. Niet vreemd bij 40 A.
Kortom het werkt.
Enkel misschien toerental nog 1 standje lager omdat er nu 16 toeren te veel zijn. Dit is toch minder nauwkeurig dan ik had gedacht. Want behalve die 16 extra maakt de regelaar van de ingevoerde 15500 en in het echt 15467 RPM van, dus 33 RPM te laag. Nu zal dit met vliegen helemaal niets uitmaken, want met te slechte accu en 35 watt minder maar 1 km/u minder.. je merkt het verschil dus niet. Heb nog even de logging nagerekend of er die derdemacht met de snelheid in zit.. geen correlatie, in de meetruis.
En even na de vlucht op de grond volgas.. haal ik 15500 RPM niet meer. Maar ik had ook wel lang doorgevlogen.
Overigens zijn eventuele mogelijke fraudeurs erg makkelijk op te sporen, na de vlucht kist even aan de wedstrijdleiding PC hangen, dan kun je de regelaar setting aflezen. Het is niet mogelijk om dat even met de hand te wijzigen met een programmeerkaart oid.
Tjarko
Een goede vlucht is 14.5V / 40 A / 585 W / 15516 RPM (16 te veel) en 109 km/u gemiddeld.
Die snelheid kan natuurlijk niet, foutje in de unilog settings 250 km/u range i.p.v. 450 km/u. Dat moet opnieuw.
Met een oude, maar warme accu, die onder de benodigde governer spanning zakt, toch nog 549 W en 108 km/u.
Ik denk dat 15.000 RPM echt genoeg is. Anders moet je nog steeds behoorlijk goede accu's hebben en op 40C verwarmd.
In detail de volgende plaatjes.
Al met al werkt het wel prima.
Optoeren is ca 2 seconden, dus startbord goed in de gaten houden, bij 5 vol gas geven. (Koude handen vandaag).
Je kunt bij het landen niet meer even gas bijgeven, duurt ook 2 seconden. Maar dead stick is ook prima. Even wennen.
De Talon 90 had ik in m'n 2e kist zitten nog geen logging, maar wel 1 vlucht gemaakt. Gaat hetzelfde. De regelaar was nog koud bij de landing
. Niet vreemd bij 40 A.Kortom het werkt.
Enkel misschien toerental nog 1 standje lager omdat er nu 16 toeren te veel zijn. Dit is toch minder nauwkeurig dan ik had gedacht. Want behalve die 16 extra maakt de regelaar van de ingevoerde 15500 en in het echt 15467 RPM van, dus 33 RPM te laag. Nu zal dit met vliegen helemaal niets uitmaken, want met te slechte accu en 35 watt minder maar 1 km/u minder.. je merkt het verschil dus niet. Heb nog even de logging nagerekend of er die derdemacht met de snelheid in zit.. geen correlatie, in de meetruis.
En even na de vlucht op de grond volgas.. haal ik 15500 RPM niet meer. Maar ik had ook wel lang doorgevlogen.
Overigens zijn eventuele mogelijke fraudeurs erg makkelijk op te sporen, na de vlucht kist even aan de wedstrijdleiding PC hangen, dan kun je de regelaar setting aflezen. Het is niet mogelijk om dat even met de hand te wijzigen met een programmeerkaart oid.
Tjarko
Laatst bewerkt door een moderator:
")