Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Naze32 icm Multiwii GUI
- Topicstarter swsa13
- Startdatum
Bedankt iedereen, ik zal een nieuwe naze32 bestellen en hopelijk is het daarmee opgelost. Dan kan de andere terug voor fabieksgarantie. Keep you posted.
Nou daar ben ik weer! Helaas met slecht nieuws...de nieuwe naze32 heeft precies hetzelfde!
Een defecte gyro/acc lijkt dus uitgesloten

Dus ik mag weer verder gaan zoeken.
Nogmaals het probleem:
Tijdens het vliegen wordt de hoek waarmee de Quad naar achteren tilt steeds groter, waardoor hij naar achteren gaat driften in Angle modus. In Acro modus gaat hij gewoon steeds sneller achterover draaien. Het is redelijk recht naar achteren, dus niet richting een arm.
Nog even de specs:
ZMR250 frame (ZMR250 H250 250mm Fiberglass Mini Quadcopter Multicopter Frame Kit - ?12.92)
RCX 2400kv motors
10A Esc's (SimonK 10A/20A/30A ESC Electronic Speed Control For RC Aircraft - ?5.62)
2200mah 3S
9x Radio RX
De drift lijkt er net op alsof je de knuppel van de pitch continue een beetje naar achteren hebt. Ik heb de waardes echter na het vliegen gemeten en die staan netjes op 1500. Als ik daarna weer opstijg is de drift nog aanwezig. Pas als ik de batterij ontkoppel is het probleem weg. Wat ik nog wil proberen is een OpenLRS ontvanger erop aan te sluiten, om zo de 9X radio RX uit te sluiten.
Het enige wat ik niet goed uit kan sluiten zijn vibraties. Waarom denk ik dat? Probleem lijkt te verergeren wanneer ik flink gas erop, ook het monteren van de Naze op dubbelzijdig foam tape heeft het probleem verminderd, maar nog steeds (hinderlijk) aanwezig.
Maarja ik heb de props en motors wel gebalanceerd, en er zitten echt geen enorme vibraties in. Alsof er een hoge frequentie in zit. Ik heb het balanceren van de motors gedaan via de baseflight motor testing zonder props. Vervolgens met tape in de weer gegaan tot de meter bijna niet meer uitslaat. Op het hoogste zoom niveau slaat hij max 0.03 uit bij de ergste motor.
Omdat de drift recht naar achteren is, lijkt mij een ESC/Motor sowieso uitgesloten?
Wie biedt?
Humz, dat verbaast me, kan me niet voorstellen dat het de zender is.
Kan je de naze 180 graden draaien? en dan in de software dus ook. Als het probleem dan gelijk blijft heeft het niets met je naze te maken en moet het esc of motor zijn, Als het dan ineens voorover gaat dan is het wel je naze.
@boris dan kan hij toch niet steeds meer verergeren qua hoek?
Kan je de naze 180 graden draaien? en dan in de software dus ook. Als het probleem dan gelijk blijft heeft het niets met je naze te maken en moet het esc of motor zijn, Als het dan ineens voorover gaat dan is het wel je naze.
@boris dan kan hij toch niet steeds meer verergeren qua hoek?
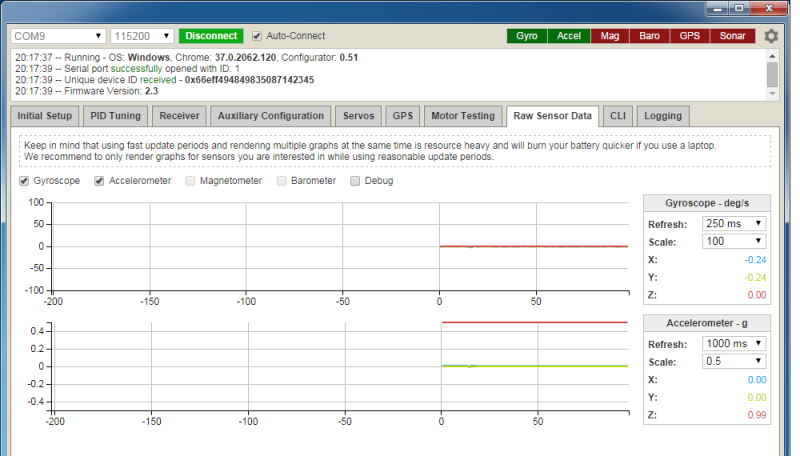
Tóch nog verder tunen? Hierbij wat screenshots:
Gyro/Acc meeting na een vlucht
PIDs
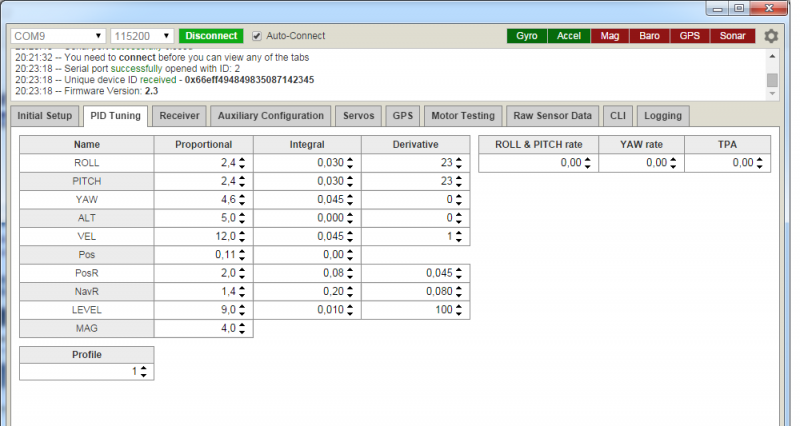
PID wijzigingen
- looptime naar 3200 (lager dan dat ging hij trillen)
- pitch en roll P van 4 naar 2.4 terug gebracht, anders veels te veel oscilaties
- Welke I omhoog? Level of pitch/roll?
Gyro/Acc meeting na een vlucht
PIDs
PID wijzigingen
- looptime naar 3200 (lager dan dat ging hij trillen)
- pitch en roll P van 4 naar 2.4 terug gebracht, anders veels te veel oscilaties
- Welke I omhoog? Level of pitch/roll?
Laatst bewerkt door een moderator:
BorisB
Forum veteraan
Klinkt echt als weinig IBeide. In level mode dan heeft hij een vaste hoek die steeds groter wordt.In acro wordt de snelheid waarmee hij naar achteren draait steeds sneller
") . Op de minis eindigde ik soms zelfs oo 0.055 voor de I.
. Op de minis eindigde ik soms zelfs oo 0.055 voor de I.BorisB
Forum veteraan
Reflash en try againHelp!!!
Iemand bekend met deze fout melding?
Hij wil ook niet meer connecten via computer
.Gecrashed of hield ie er ineens mee op?
Laatst bewerkt door een moderator:
@topix ik kan de kleuren niet zien, maar helpt dit
https://dronematters.zendesk.com/hc/en-us/articles/202991740-My-Naze-LED-is-flashing-green-and-red
Nig aanvulling, zelf nooit gebruikt maar wellicht kan je hier nog wat mee?
You can short the bootloader pins before connecting your USB-Serial. After that go into the firmware flasher of cTn's chrome app and tick the box "No reboot sequence". Then you should be able to flash it.
https://dronematters.zendesk.com/hc/en-us/articles/202991740-My-Naze-LED-is-flashing-green-and-red
Nig aanvulling, zelf nooit gebruikt maar wellicht kan je hier nog wat mee?
You can short the bootloader pins before connecting your USB-Serial. After that go into the firmware flasher of cTn's chrome app and tick the box "No reboot sequence". Then you should be able to flash it.
Die bootloader pads moet je dan kortsluiten (paperclip) tentijde dat je de usb erin doet, wellicht connect hij dan met je pc. Ik heb echt geen idee wat het precies doet, maar is simpel testje. Dit was de oplossing voor anderen die niet meer aan pc konden connecten.
Vind ook vaag dat er geen error leds beschrijving is, ik kan het althns niet vinden.
Die link had ik hier vandaan, zelfde wat jij lijkt te hebben toch? http://youtu.be/xY0rLeC6A1o
Vind ook vaag dat er geen error leds beschrijving is, ik kan het althns niet vinden.
Die link had ik hier vandaan, zelfde wat jij lijkt te hebben toch? http://youtu.be/xY0rLeC6A1o
Maar wat is het probeer dan? Ga het proberen.... De rode en groene led knipperen om de beurt en blauw is constant aan
Oh dat betekend dus dood??? Je link je zegt dat dus maar de i2c pin ofzo welke is dat?
Unfortunately, this means you broke your Naze. The gyro is dead (or i2c bus is shorted out).
Vertaling:
Helaas, dit betekend dat je je naze gesloopt hebt, de gyro-sensor is dood/defect (of je i2c bus heeft kortsluiting gemaakt).
Hoi!
Mijn probleem is zo goed als opgelost! Het ophogen van de i waardes was de oplossing. Voor in acro mode diende ik die van de pitch en roll te verhogen naar 0,055 en voor angle mode de level i naar o,03.
Bedankt voor de tips!
Enige vraag is nog, wanneer is de I te hoog? Bij kk boord begon die dan langzaam te oscilleren.
Mijn probleem is zo goed als opgelost! Het ophogen van de i waardes was de oplossing. Voor in acro mode diende ik die van de pitch en roll te verhogen naar 0,055 en voor angle mode de level i naar o,03.
Bedankt voor de tips!
Enige vraag is nog, wanneer is de I te hoog? Bij kk boord begon die dan langzaam te oscilleren.
Heb zojuist met bootloader geprobeerd nog steeds geen resultaten hij flashed wel maar dan krijg ik de zelfde Error. .. naze32 is dood..:-( kan de race zondag wel op me buik schrijven...
Heb nog een spare liggen, wil wel zsm een nieuwe aub...
Anders heb ik hetzelfde probleem
")