Zonder enige RC-ervaring ben ik van plan een RC Voskhod 2M draagvleugelboot te bouwen (schaal 1:35, lengte 79cm, breedte 12cm). Uiteraard is mijn doel dat de boot zich bij voldoende snelheid uit het water tilt (foil borne). Het geschatte gewicht van de boot is rond de 2kg.
Na rondvraag heb ik het volgende systeem in gedachten:
Electronica:
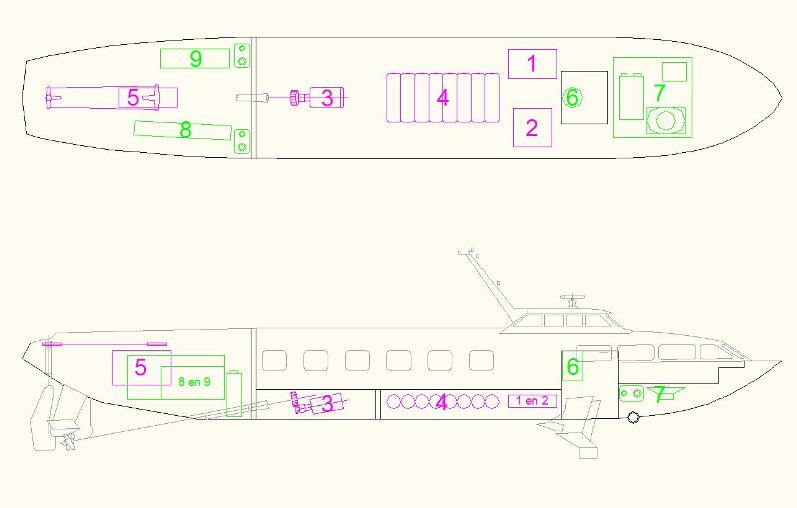
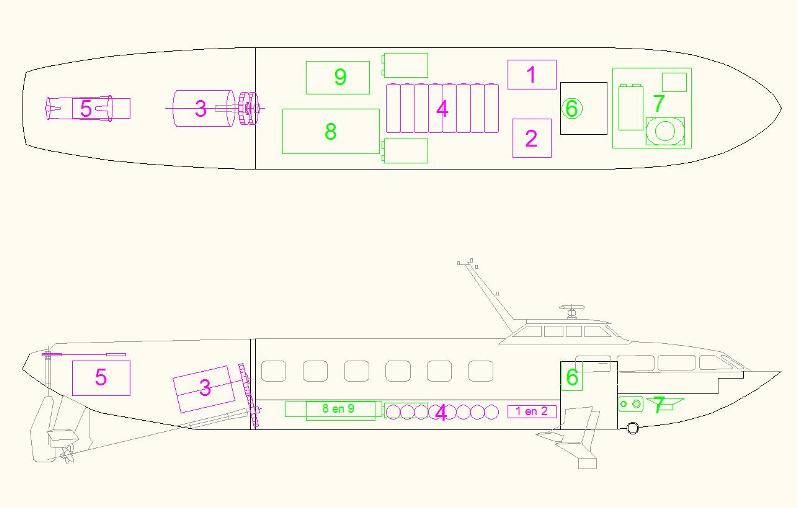
Wat electronica betreft meen ik nodig te hebben (na een en ander te hebben opgezocht):
· Ontvanger: Jeti Duplex EX R8 2,4GHz8 kanaals [1];
· zender/afstandbediening Futaba F14 2.4 GHz;
· regelaar; (Graupner Speed Profi 40R) [2];
· electromotor: Graupner SPEED 250 (of SPEED 320) 7.2V [3];
· oplaadbare AA batterijen: 6 à 8 Sanyo ENELOOP (NiMH) 2000mA [4];
· roerservo: Futaba S148 [5].
Eventueel ook nog (voor in een later stadium):
· navigatielichten;
· mastlicht;
· zoeklicht;
· stuurhutverlichting
· radarmotor [6] ;
· geluidsmodules [7 en 8];
· strobemodule [9].
Zodra mijn keuze definitief is kan ik mijn ontwerp hier op baseren.
Electromotor:
Wat betreft de snelheid (topsnelheid van de Voskhod 1:1 is 60 à 70 km/h), zijn drie snelheden van belang; een langzame snelheid voor het manouvreren in de haven, een overgangsnelheid om de romp uit het water te liften en uiteraard de topsnelheid (de schaalsnelheid is 1,7 à 2,0 km/h, maar ik vraag me af of dat voldoende is voor foil borne). Dient de vaartregelaar hier op ingesteld te worden?
De aandrijving zal naast een electromotor bestaan uit een zesbladsschroef (diameter 19mm) in combinatie met een Raboesch 301-12 schroefas (3mm) en schroefaskoker. Ik ben geadviseerd om te zoeken naar een motor met minimal 6V en een toerental tussen de 12.000 en 16.000rpm. Daarnaast is er weing ruimte voor de motor aangezien die onder de vloer van het passagiersgedeelte wordt weggewerkt, en is een maximale diameter van 20 à 25mm gegeven.
De motor die ik op het oog heb is de Graupner SPEED 250 7.2V (met een dubbel cardanoverbrenging koppelen aan de motor onder een hoek (schroefas/motoras) van circa 20 graden):
· Operating voltage range 3,7...8,4 V 3 A;
· Diameter (bxh) 20,5 mm/15.5 mm;
· Case length 25 mm;
· Weight 22 g;
· Maximum efficiency 50 %;
· No-load current drain 0,18 A;
· Charging rate at max. efficiency 0,7 A;
· No-load speed 15000 U/min;
· Nominal voltage 7.2 V;
· Shaft diameter 2 m;
· Free shaft length 8,5mm.
Als alternatief (hoger amperage) denk ik aan de Graupner SPEED 320 7.2V (met tandwieloverbrenging tot circa 16.000rpm):
· Operating voltage range 3,7...8,4 V 12 A;
· Diameter (bxh) 20,5 mm/15.5 mm;
· Case length 32 mm;
· Weight 32 g;
· Maximum efficiency 57 %;
· No-load current drain 0,3 A;
· Charging rate at max. efficiency 2 A;
· No-load speed 21000 U/min;
· Nominal voltage 7.2 V;
· Shaft diameter 2 m;
· Free shaft length 8mm.
Gaarne advies of bovenstaande motoren voldoen om de boot foilborne te krijgen. Daarnaast lees ik graag adviezen en opmerkingen betreffende het gehele systeem.
Noot: er is al een andere discussie gaande over een Voskhod op dit forum, maar zowel schaal (1:21) als aandrijving (2 vierbladsschroeven) zijn anders en daarom niet vergelijkbaar.
Na rondvraag heb ik het volgende systeem in gedachten:
Electronica:
Wat electronica betreft meen ik nodig te hebben (na een en ander te hebben opgezocht):
· Ontvanger: Jeti Duplex EX R8 2,4GHz8 kanaals [1];
· zender/afstandbediening Futaba F14 2.4 GHz;
· regelaar; (Graupner Speed Profi 40R) [2];
· electromotor: Graupner SPEED 250 (of SPEED 320) 7.2V [3];
· oplaadbare AA batterijen: 6 à 8 Sanyo ENELOOP (NiMH) 2000mA [4];
· roerservo: Futaba S148 [5].
Eventueel ook nog (voor in een later stadium):
· navigatielichten;
· mastlicht;
· zoeklicht;
· stuurhutverlichting
· radarmotor [6] ;
· geluidsmodules [7 en 8];
· strobemodule [9].
Zodra mijn keuze definitief is kan ik mijn ontwerp hier op baseren.
Electromotor:
Wat betreft de snelheid (topsnelheid van de Voskhod 1:1 is 60 à 70 km/h), zijn drie snelheden van belang; een langzame snelheid voor het manouvreren in de haven, een overgangsnelheid om de romp uit het water te liften en uiteraard de topsnelheid (de schaalsnelheid is 1,7 à 2,0 km/h, maar ik vraag me af of dat voldoende is voor foil borne). Dient de vaartregelaar hier op ingesteld te worden?
De aandrijving zal naast een electromotor bestaan uit een zesbladsschroef (diameter 19mm) in combinatie met een Raboesch 301-12 schroefas (3mm) en schroefaskoker. Ik ben geadviseerd om te zoeken naar een motor met minimal 6V en een toerental tussen de 12.000 en 16.000rpm. Daarnaast is er weing ruimte voor de motor aangezien die onder de vloer van het passagiersgedeelte wordt weggewerkt, en is een maximale diameter van 20 à 25mm gegeven.
De motor die ik op het oog heb is de Graupner SPEED 250 7.2V (met een dubbel cardanoverbrenging koppelen aan de motor onder een hoek (schroefas/motoras) van circa 20 graden):
· Operating voltage range 3,7...8,4 V 3 A;
· Diameter (bxh) 20,5 mm/15.5 mm;
· Case length 25 mm;
· Weight 22 g;
· Maximum efficiency 50 %;
· No-load current drain 0,18 A;
· Charging rate at max. efficiency 0,7 A;
· No-load speed 15000 U/min;
· Nominal voltage 7.2 V;
· Shaft diameter 2 m;
· Free shaft length 8,5mm.
Als alternatief (hoger amperage) denk ik aan de Graupner SPEED 320 7.2V (met tandwieloverbrenging tot circa 16.000rpm):
· Operating voltage range 3,7...8,4 V 12 A;
· Diameter (bxh) 20,5 mm/15.5 mm;
· Case length 32 mm;
· Weight 32 g;
· Maximum efficiency 57 %;
· No-load current drain 0,3 A;
· Charging rate at max. efficiency 2 A;
· No-load speed 21000 U/min;
· Nominal voltage 7.2 V;
· Shaft diameter 2 m;
· Free shaft length 8mm.
Gaarne advies of bovenstaande motoren voldoen om de boot foilborne te krijgen. Daarnaast lees ik graag adviezen en opmerkingen betreffende het gehele systeem.
Noot: er is al een andere discussie gaande over een Voskhod op dit forum, maar zowel schaal (1:21) als aandrijving (2 vierbladsschroeven) zijn anders en daarom niet vergelijkbaar.