Theo,
Ik vindt het lastig om het je duidelijk uit te leggen zonder een heel fundamenteel verhaal te beginnen over mechanica (de leer van krachten, momenten, sterkte doorbuigingen etc.).
De blauwe lijnen zoals jij ze getekend hebt zijn in iedergeval geen reactiekrachten in de servo veroorzaakt door het trekken aan de servo..
Je theorietje over het kantelen over een lange en kantelen over een kortelijn is interesant.. Dat is nu net waarop ik geprobeerd heb de theoretische onderbouwing van te geven. Het maakt dus niets uit of ik trek in de richting B over de lengte d, of in de richting A over de lengte c.
Hier een stukje uitleg. Een kanteling wordt veroorzaakt doordat een kracht aangrijpt op een ander punt dan het draaipunt. Dat moge duidelijk zijn, een kracht in een draaipunt verdraait niets. Doe de deur maar eens dicht door op het draaipunt te drukken... nou dan ben je nog wel even bezig.
Ik denk ook dat je het volgende weet en anders wel aan kunt voelen: Hoe verder de kracht van het draaipunt af staat (dat is de "arm") hoe meer moeite je moet doen in het draaipunt om draaien te voorkomen. Dit is het zelfde als: Het kost meer kracht om de de deur te sluiten als ik in de buurt van het draaipunt duw of als ik bij de klink duw. De weerstand in het scharnier moet overwonnen worden en dat kan dus op 2 manieren. De variatie is dat in beide gevallen de kracht vermenigvuldigd met de afstand naar het draaipunt gelijk is. Even een voorbeeld:
De deur is één meter breed. Bij de klink (1 meter van het draaipunt) moet ik met 2 kg drukken om de deur dicht te krijgen. Het door mij opgewekte "moment" is dan 2kgx1m = 2Kg/m (2kg per meter). Als ik nu op 0.1 meter ga drukken dan moet ik om datzelfde moment
op te brengen dus met 20kg drukken. 20kgx0.1m=2kg/m
Dit is eigenlijk de hele basis van mijn betoog. Het enige is dat we van mening verschillen over wat nu de "arm" is die de afstand definieerd tussen de kracht en het draaipunt. De definitie uit de mechanica is:
De arm is de loodrechte afstand van de kracht naar het draaipunt.
Dit is exact wat ik gedaan heb. Mijn arm a staat haaks op de kracht Fr. Jouw arm c staat niet loodrecht op de kracht a.. Daar zit het verschil.
En omdat ik het niet met woorden kan vertellen, hier het bewijs.


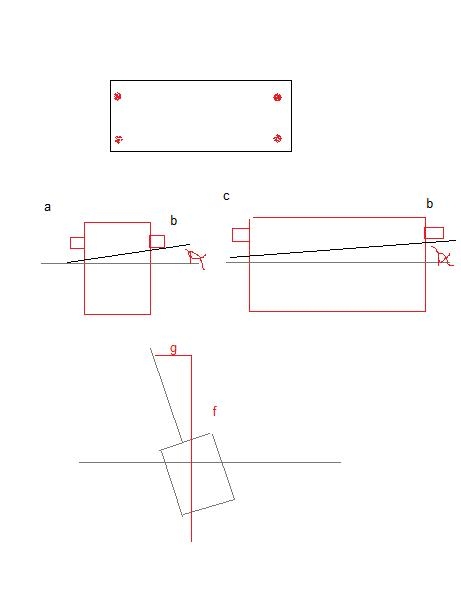
Achterste balk horizontaal: Dit is de wip
Rode pijl: Daar zit het draaipunt
Beide schroeven even hoog boven de wip uit.
Bovenste foto is als de deur. Je trekt recht boven het draaipunt.
Onderste foto is als servo. Je trekt verschoven t.o.v. draaiunt.
En je ziet de reactiekracht door de weegschaal gemeten is in beide situaties gelijk (2764 gram en 2753 gram).
Grz
mark
Zolang je geen maat van kracht weergeeft op je draad, bewijs je nog niet echt iets...maar we zullen aannemen dat die in beide gevallen gelijk was.
En deze proef was dan ook correct tot dat...je een kanteling krijgt, in dat geval zal de arm in het eerste plaatje niks tot weinig veranderen, dus je moment blijft ongeveer hetzelfde. In je tweede plaatje daarentegen zal de kop van je schroef stijgen en daarmee ook je arm verlengen, met dezelfde kracht maal een langere arm, krijg je een groter moment.
")