Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
[Slopium] Een DIY ultra-light VTPR kist
- Topicstarter prop-er
- Startdatum
DirkSchipper
Forum veteraan
Kleurtjes?Ja, dat klopt wel ongeveer. Ik had er verder ook totaal niet aan gerekend. De Rovings zitten nog net iets onder de top van het profiel, zodat het profiel netjes geplamuurd en geschuurd kan worden.
Moet eens gaan nadenken over de te gebruiken kleurtjes verf.
Lamineerfolie! Helder!
Je gaat die schitterende decor-uitsparingen toch niet dichtkwasten ....


Dirk.
Oeps... weet ook niet alles... wat is NS in deze?
prop-er
Forum veteraan
Domme vragen bestaan niet!
Kretologie van RCgroups. NS staat voor "New stuff". Lamineerfolie verwerk je op dezelfde manier als gewone oracover, het krimpt alleen niet. Het is erg licht van gewicht, makkelijk te verwerken, goedkoop en als je het over schuim aanbrengt krijg je een behoorlijk crashbestendige constructie. (Maar dat moet ik nog testen...)
Kretologie van RCgroups. NS staat voor "New stuff". Lamineerfolie verwerk je op dezelfde manier als gewone oracover, het krimpt alleen niet. Het is erg licht van gewicht, makkelijk te verwerken, goedkoop en als je het over schuim aanbrengt krijg je een behoorlijk crashbestendige constructie. (Maar dat moet ik nog testen...)
Ah! Mylar... (folie waarmee je ook elektrostaten kan bouwen...)
Theoretisch hoef je alleen de spantopeningen te dichten?
Een hele vleugel aflappen zal nog een kunst zijn. De spanning aan beide zijden gelijk te houden om de zaak niet te laten kromtrekken. Waarbij je de mylar mogelijk niet eens onder zeer hoge spanning hoeft aan te brengen...
Gebruik je de acrylverf tevens als lijm? Ofwel... gaat deze verlijmen bij lichte verhitting? Of werk je met fotomontage spuitbus?
Mocht je Oracover Heissiegelkleber gaan gebruiken... die stof is mogelijk agressief op latex/acryl verfjes...
Groet Bas
Theoretisch hoef je alleen de spantopeningen te dichten?
Een hele vleugel aflappen zal nog een kunst zijn. De spanning aan beide zijden gelijk te houden om de zaak niet te laten kromtrekken. Waarbij je de mylar mogelijk niet eens onder zeer hoge spanning hoeft aan te brengen...
Gebruik je de acrylverf tevens als lijm? Ofwel... gaat deze verlijmen bij lichte verhitting? Of werk je met fotomontage spuitbus?
Mocht je Oracover Heissiegelkleber gaan gebruiken... die stof is mogelijk agressief op latex/acryl verfjes...
Groet Bas
prop-er
Forum veteraan
Driewerf neen...
Mylarfolie heeft geen plaklaag. Dit is lamineerfolie. Wordt gebruikt en verkocht om zelf geprinte foto's of andere documenten in een lamineerapparaat te ..eh...lamineren. Plaklaag wordt geactiveerd door warmte. Zoals gezegd, net als oracover.
Zoals gezegd: de folie wordt aangebracht om de crashbestendigheid van het schuim te verhogen. En natuurlijk tevens als afwerking. Alles wordt dus ingep(l)akt.
Zoals gezegd: de folie krimpt niet. "De boel" gaat dus niet kromtrekken.
Mylarfolie heeft geen plaklaag. Dit is lamineerfolie. Wordt gebruikt en verkocht om zelf geprinte foto's of andere documenten in een lamineerapparaat te ..eh...lamineren. Plaklaag wordt geactiveerd door warmte. Zoals gezegd, net als oracover.
Zoals gezegd: de folie wordt aangebracht om de crashbestendigheid van het schuim te verhogen. En natuurlijk tevens als afwerking. Alles wordt dus ingep(l)akt.
Zoals gezegd: de folie krimpt niet. "De boel" gaat dus niet kromtrekken.
prop-er
Forum veteraan
Dat wordt inderdaad een leuke uitdaging. Ook hiervoor is een leuke oplossing bedacht.
Geen foto's vanavond.
Eerste vleugel is bokstijf. Torsie is nog drama, maar ik hoop dat de folie wat torsiestijfheid brengt.
Kiertjes naast de rovings zijn nu geplamuurd.
Tweede vleugel is net van gesopte rovings voorzien.
Geen foto's vanavond.
Eerste vleugel is bokstijf. Torsie is nog drama, maar ik hoop dat de folie wat torsiestijfheid brengt.
Kiertjes naast de rovings zijn nu geplamuurd.
Tweede vleugel is net van gesopte rovings voorzien.
Ha! Hobbydeformatie... stik.. ik dacht folie om mee te vacu-baggen...
Maar schier 'lamineerfolie'! Slim!
Zal 's wat bij Staples ophalen... voor een testje...
En... aan de boekbinder of drukker... want in lamineerfolie voor drukwerk is nogal wat keuze... glanzend t/m gematteerd. Dan ook nog eens van de rol... te lakken met UV vernis...
Maar schier 'lamineerfolie'! Slim!
Zal 's wat bij Staples ophalen... voor een testje...
En... aan de boekbinder of drukker... want in lamineerfolie voor drukwerk is nogal wat keuze... glanzend t/m gematteerd. Dan ook nog eens van de rol... te lakken met UV vernis...
Laatst bewerkt:
is dat spul niet erg zwaar?
")
DirkSchipper
Forum veteraan
Ik heb nog nooit lamineerfolie gebruikt, maar er al wel een hoop over gelezen en gehoord. Het schijnt idd. heel aardig spul te zijn.
Voor de vleugel van Vincent is het goed te gebruiken, maar omdat het niet (of nauwelijks) krimpt moet een vleugel die uit x panelen bestaat met net zoveel aparte stukken worden gelamineerd met een stukje overlap om toch stevig te worden. En dat kan aardig lastig worden.
Dirk
Voor de vleugel van Vincent is het goed te gebruiken, maar omdat het niet (of nauwelijks) krimpt moet een vleugel die uit x panelen bestaat met net zoveel aparte stukken worden gelamineerd met een stukje overlap om toch stevig te worden. En dat kan aardig lastig worden.
Dirk
prop-er
Forum veteraan
Mechanical expo: is hetzelfde als de expo die je in een zender kan instellen, maar dan mechanisch uitgevoerd.
Lijkt simpel, maar is het niet. De te realiseren beweging moet zowel bij "up" als "down" exponentieel werken.
Het voordeel? Een servo heeft een resolutie. Om optimaal gebruik te maken van de aanwezige resolutie, zou het mooi zijn als de de eerste 22,5° uitslag van een servohevel een kleine uitslag van het roer tot gevolg heeft. Bij een servo uitslag tussen 22,5 en 45° mag het roer snel richting max uitslag.
Het idee was om dit principe toe te passen op de Fox Pitcheron. De vleugels kunnen een behoorlijke uitslag hebben, maar rondom het nulpunt wil je maximale resolutie. Er zijn tientallen systemen bedacht, maar ik kwam er niet uit.
Twee jaar terug hebben vijf volwassen mannen tijdens de Wasserkuppe expeditie de hele nacht wakker gelegen om een werkende oplossing voor mechanical expo te bedenken. Tevergeefs.
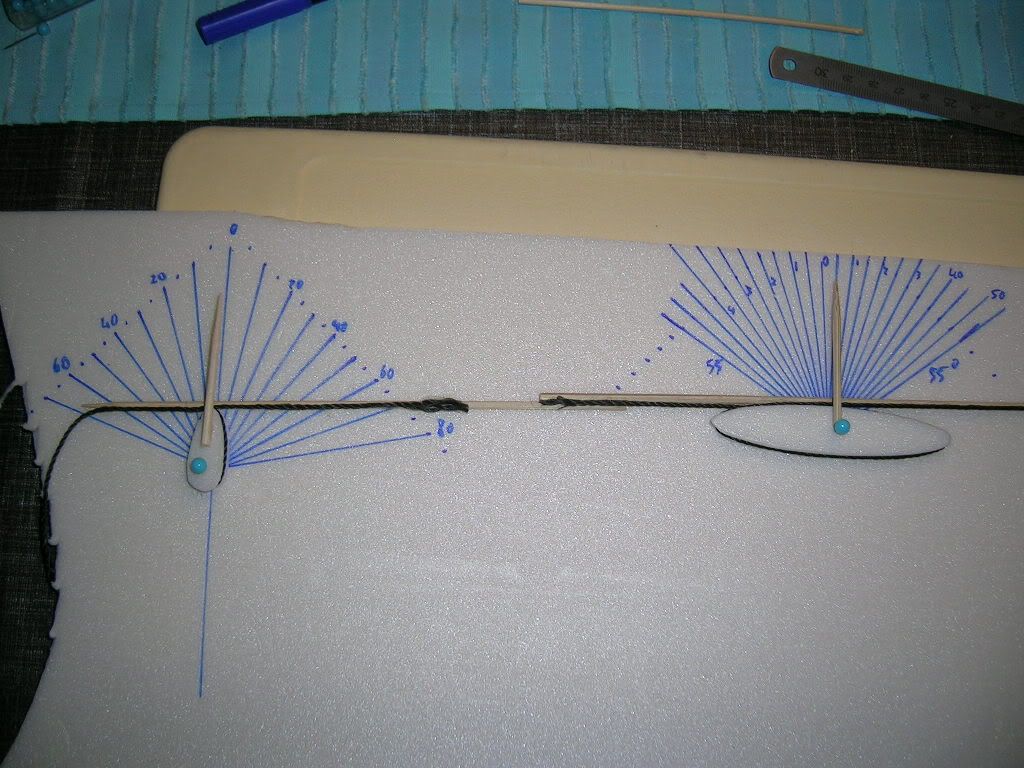
Maar nu, twee jaar later, is het toch gelukt. Zie hier mijn twincam (©) systeem:
(Linker cam stelt de staart voor, rechter cam is de servo)
Op RCgroups hebben Steve en Dawson met een "madstab" geëxperimenteerd. De full flying stab heeft een uitslag van +90° tot -90°. Hiermee zijn prachtige nieuwe acrofiguren mogelijk.
Juist met dit madstab systeem lijkt mechexpo grote voordelen te hebben. Een te grove resolutie rondom +5° tot -5° vliegt niet lekker.
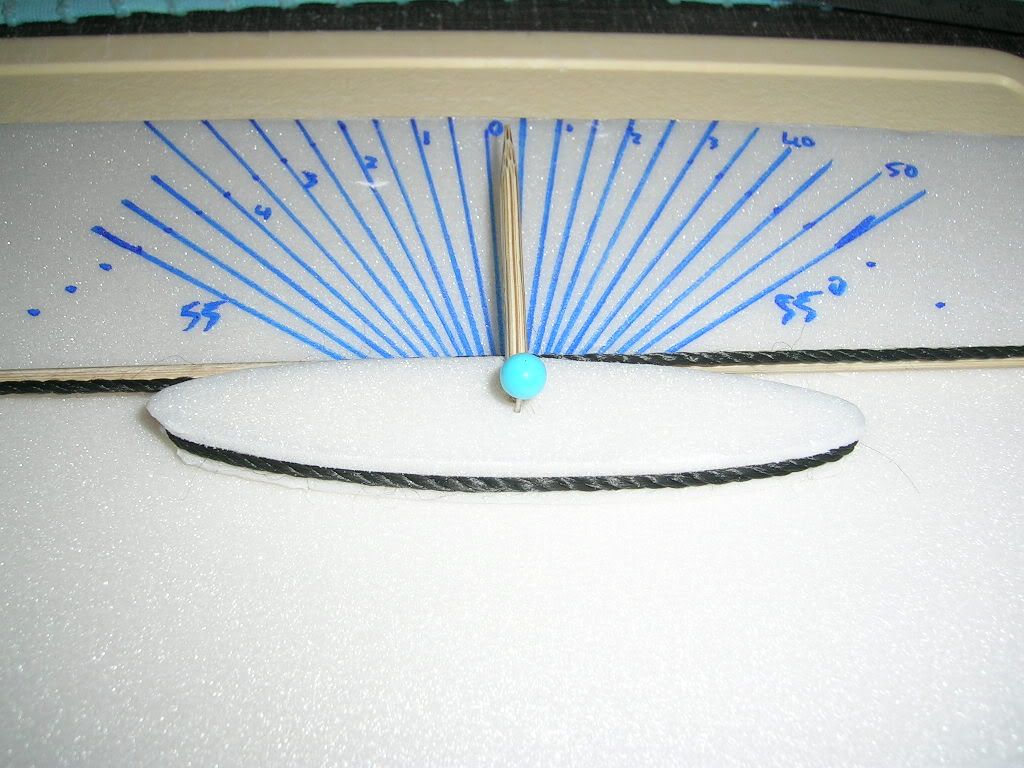
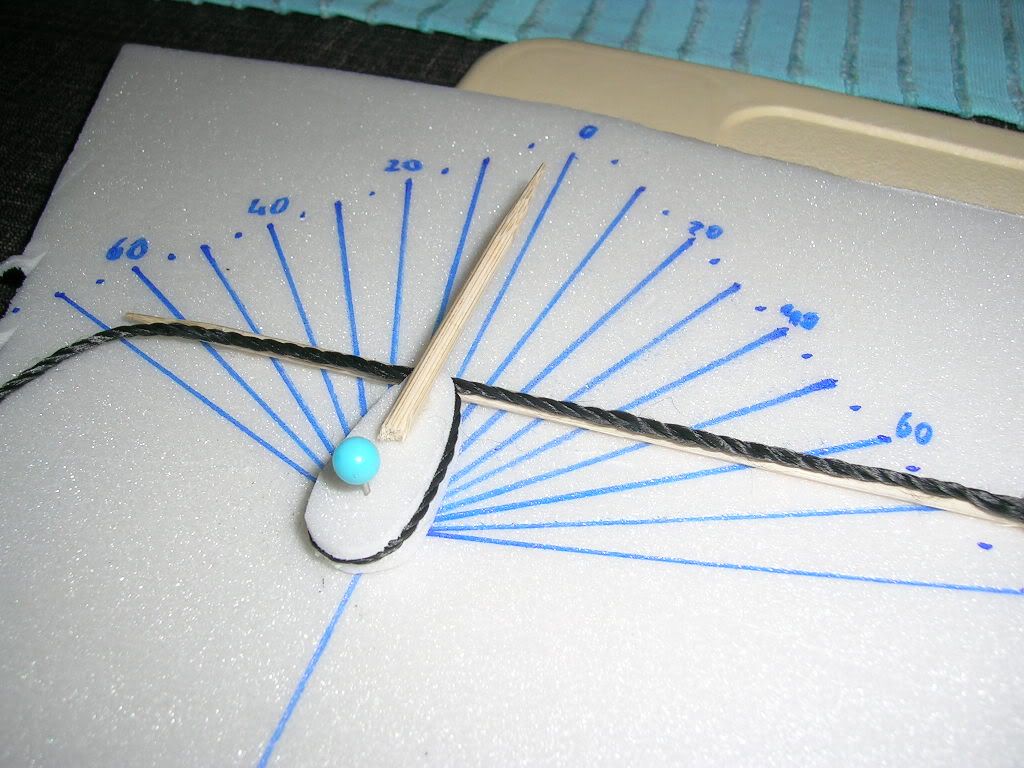
Het Twincam systeem werkt met twee cams rolleyes waaromheen een draad gespannen zit. De draadeinden zitten vast aan een pushrod. Om slip te voorkomen kan de draad onderaan de cam gefixeerd worden met een drupje CA. Door de cams ellipsvormig te maken, en 90° verdraaid ten opzichte van elkaar te monteren, ontstaat er een tegengestelde dubbele natuurlijke aanpassing van de armlengte, waardoor een nogal behoorlijk expo effect ontstaat.
rolleyes waaromheen een draad gespannen zit. De draadeinden zitten vast aan een pushrod. Om slip te voorkomen kan de draad onderaan de cam gefixeerd worden met een drupje CA. Door de cams ellipsvormig te maken, en 90° verdraaid ten opzichte van elkaar te monteren, ontstaat er een tegengestelde dubbele natuurlijke aanpassing van de armlengte, waardoor een nogal behoorlijk expo effect ontstaat.
Vincent
Lijkt simpel, maar is het niet. De te realiseren beweging moet zowel bij "up" als "down" exponentieel werken.
Het voordeel? Een servo heeft een resolutie. Om optimaal gebruik te maken van de aanwezige resolutie, zou het mooi zijn als de de eerste 22,5° uitslag van een servohevel een kleine uitslag van het roer tot gevolg heeft. Bij een servo uitslag tussen 22,5 en 45° mag het roer snel richting max uitslag.
Het idee was om dit principe toe te passen op de Fox Pitcheron. De vleugels kunnen een behoorlijke uitslag hebben, maar rondom het nulpunt wil je maximale resolutie. Er zijn tientallen systemen bedacht, maar ik kwam er niet uit.
Twee jaar terug hebben vijf volwassen mannen tijdens de Wasserkuppe expeditie de hele nacht wakker gelegen om een werkende oplossing voor mechanical expo te bedenken. Tevergeefs.
Maar nu, twee jaar later, is het toch gelukt. Zie hier mijn twincam (©) systeem:
(Linker cam stelt de staart voor, rechter cam is de servo)
Op RCgroups hebben Steve en Dawson met een "madstab" geëxperimenteerd. De full flying stab heeft een uitslag van +90° tot -90°. Hiermee zijn prachtige nieuwe acrofiguren mogelijk.
Juist met dit madstab systeem lijkt mechexpo grote voordelen te hebben. Een te grove resolutie rondom +5° tot -5° vliegt niet lekker.
Het Twincam systeem werkt met twee cams
rolleyes waaromheen een draad gespannen zit. De draadeinden zitten vast aan een pushrod. Om slip te voorkomen kan de draad onderaan de cam gefixeerd worden met een drupje CA. Door de cams ellipsvormig te maken, en 90° verdraaid ten opzichte van elkaar te monteren, ontstaat er een tegengestelde dubbele natuurlijke aanpassing van de armlengte, waardoor een nogal behoorlijk expo effect ontstaat.
Code:
servo staart
0° 0°
10° 5°
20° 10°
30° 25°
40° 40°
50° 75°
55° 100°Vincent
Laatst bewerkt door een moderator:
Heerlijk stukje techniek Vincent 
Ziet er prima uit! Enige nadeel is misschien de benodigde servokracht bij volle uitslag, net als roer naar vol gaat (en meeste kracht nodig is) hou je minder over, dubbelop (lange hevel bij servo en korte bij roer).
Ben benieuwd naar praktische uitvoering, toevallig een linkje naar RCGroups topic?
Anders snuffel ik zelf wel even.
Ziet er prima uit! Enige nadeel is misschien de benodigde servokracht bij volle uitslag, net als roer naar vol gaat (en meeste kracht nodig is) hou je minder over, dubbelop (lange hevel bij servo en korte bij roer).
Ben benieuwd naar praktische uitvoering, toevallig een linkje naar RCGroups topic?
Anders snuffel ik zelf wel even.
prop-er
Forum veteraan
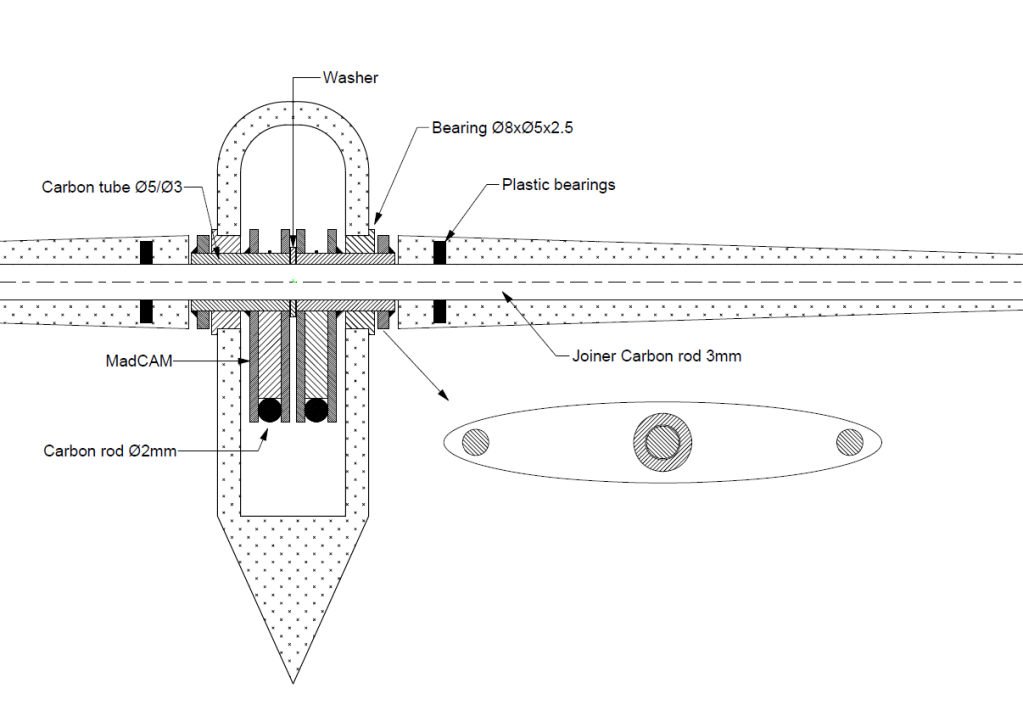
De overbrenging verloopt nu van 2:1 naar 1:2. Valt dus wel mee, en is wat ik minimaal wilde bereiken. De afplatting zou eigenlijk nog iets extremer kunnen.
Het ziet er misschien wat lomp groot uit, maar ook dat valt mee. Ik gebruik 10 gram servo's, en als je daar het kruishoorntje van pakt, past de ellips daar in de lengte en breedte exact op.
Het ziet er misschien wat lomp groot uit, maar ook dat valt mee. Ik gebruik 10 gram servo's, en als je daar het kruishoorntje van pakt, past de ellips daar in de lengte en breedte exact op.