@Sander:
Jij had de romp van je Easystar afgewerkt met glasmat en dat zag er perfect uit! Nou ben ik dus ook wat aan het rondkijken voor die glasmat, maar zie door de bomen het bos niet meer. Er wordt vaak aangeraden om zogenaamde kepermat te gebruiken voor rompen omdat dat beter te vormen is, maar kan niet vinden waar dat te verkrijgen is.
Is dit bijvoorbeeld wat?
https://www.vliegtuigmodelbouw.nl/artikeleninformatie.php?artikelcode=GR6005
Waar haal jij je glasmat en hoe verwerk je dat spul eigenlijk?
Die glasmat lijkt me prima, is vergelijkbaar met die van RCTechnics.
Verwerking is simpel, al doende leert men, maar eerst moet je wat voorbewerking doen.
Wat heb je nodig:
25 -40 gram/m^2 glasmat
Polyurethaan parketlak op waterbasis (transparant)
Kleine rechte roller (5cm) voor lakverf
Plastic of glazen bakje om de lak in te doen
Schilderstape, bij voorkeur blauw (voor 't contrast)
1) Plak het deel van de romp dat je wilt glassen af met schilderstape, de lijnen die je zet worden later de lijnen waarlangs je de glasmat afsnijdt.
2) Schuur de romp op tot aan de schilderstape met korrel 240 of fijner schuurpapier, de hele romp moet mat zijn en mag nergens meer glimmen. Nat gaat dit overigens beter dan droog, dus je kunt 't best waterproof schuurpapier nemen en 't schuurpapier vochtig maken.
3) Neem de romp af zodat deze droog is.
4) Leg de romp neer met de kant die geglast moet worden naar boven, zorg dat deze stevig ligt en niet om kan vallen.
5) Drapeer de glasmat over romp en knip deze op maat zodat er aan elke kant van de schilderstape een paar cm overblijft, trek de glasmat strak zodat de rimpels er globaal uit zijn.
6) Giet wat lak in een bakje, rol de roller erin en zorg dat deze verzadigd is met lak.
7) Rol vanuit 't midden in lange halen over de romp, als alles glad en egaal is rol dan naar de zijkanten toe.
8 ) Rol over de schilderstape heen, maar zorg dat de romp aan de andere kant niet 'nat' wordt. Rol eventuele bobbels en vouwen eruit met een kruislinkse beweging.
9) Laat de lak drogen, eventueel kan je met een föhn 't droogproces versnellen, zonder föhn duurt dit meestal een minuut of 20, met föhn een minuut of vijf.
10) Herhaal dit een keer of 5 á 6 totdat de glasmat helemaal dicht zit met lak en er geen weefstructuur meer zichtbaar is.
11) Snij met een X-acto of breekmes de glasmat weg langs de schilderstape, verwijder de schildertape met de daaraan vast geplakte resten glasmat.
12) Roller en bakje reinigen met water, idem voor eventuele vlekken.
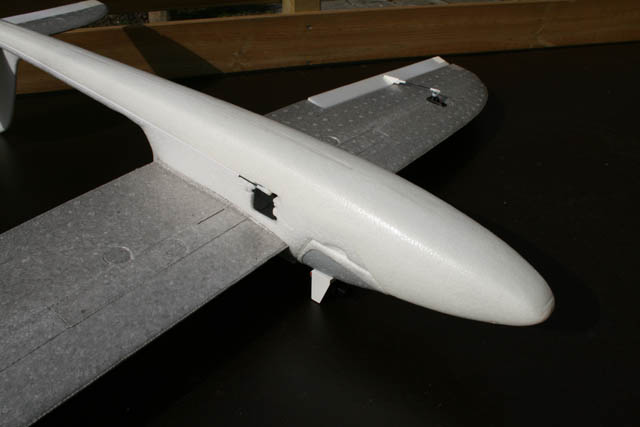
13) De romp is nu klaar voor gebruik!
Met vriendelijke groet,
Sander Sassen
ImmersionRC - Real Virtuality
")


")