Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Project Pilatus B4
- Topicstarter Ariel
- Startdatum
Ariel
PH-SAM
Heeft die DES geen broertje met kunststof tandwielen? Je zou als optie 2 een kunststof tandwielsetje in die servo kunnen zetten. Hoogteroer is het mistgevoelige roer voor klappen e.d. daar kun je rustig kunststof tandwielen inzetten.
Gerben
Ik heb net gekeken en inderdaad, DES heeft nog een broertje met carbon tandwielen.
En dat is het DES 585 BB.
Deze ga ik bestellen.
Gerben bedankt voor deze hint!
Johannes
Ariel
PH-SAM
Eindelijk zijn de bestelde onderdelen voor de B4 binnen.

Het hoogteroer servo in de B4 met de metalen tandwielen kan ik nu vervangen door een Graupner DES 586 BB. En inderdaad dit servo heeft bijna geen speling op de tandwielen.
Verder komen nog drie sensoren in de B4
- MSB speed sensor
- Vario - / Altimeter
- [ V ] - Sensor
De B4 wil ik vooral gebruiken voor kunstvlucht.
Figuren vliegen zonder onnodig veel hoogte te verliezen is best wel moeilijk. Daarom wil ik hulpmiddelen gebruiken zoals de airspeed meter en vario- / hoogtemeter.
Johannes
Het hoogteroer servo in de B4 met de metalen tandwielen kan ik nu vervangen door een Graupner DES 586 BB. En inderdaad dit servo heeft bijna geen speling op de tandwielen.
Verder komen nog drie sensoren in de B4
- MSB speed sensor
- Vario - / Altimeter
- [ V ] - Sensor
De B4 wil ik vooral gebruiken voor kunstvlucht.
Figuren vliegen zonder onnodig veel hoogte te verliezen is best wel moeilijk. Daarom wil ik hulpmiddelen gebruiken zoals de airspeed meter en vario- / hoogtemeter.
Johannes
Gerben
Forum veteraan
Hoeveel ballast kun je in die B4 kwijt Johannes?
Misschien heb je t al genoemd, maar 22 pagina's was me iets teveel zoeken")
Voor kunstvlucht zal het interessant zijn om te zoeken naar een optimum aan ballast voor voldoende 'Durchzug' zonder aan de vliegeigenschappen afbreuk te doen. Dat kan nou mooi mbv de airspeed sensor en altimeter/vario. Houdt ons op de hoogte, interessant onderwerp!
Gerben
Misschien heb je t al genoemd, maar 22 pagina's was me iets teveel zoeken
Voor kunstvlucht zal het interessant zijn om te zoeken naar een optimum aan ballast voor voldoende 'Durchzug' zonder aan de vliegeigenschappen afbreuk te doen. Dat kan nou mooi mbv de airspeed sensor en altimeter/vario. Houdt ons op de hoogte, interessant onderwerp!
Gerben
De verteller van de DVD is Paul Nathan die er een voorstander van is om ELKE model zwever te vliegen met een instelhoekverschil van o graden.
Liefst zo klein mogelijk.
Hangt ook af van verscheidene parameters.
Soort toestel, windsterkte, om maar iets te zeggen.
Ariel
PH-SAM
Hoeveel ballast kun je in die B4 kwijt Johannes?
Misschien heb je t al genoemd, maar 22 pagina's was me iets teveel zoeken
Voor kunstvlucht zal het interessant zijn om te zoeken naar een optimum aan ballast voor voldoende 'Durchzug' zonder aan de vliegeigenschappen afbreuk te doen. Dat kan nou mooi mbv de airspeed sensor en altimeter/vario. Houdt ons op de hoogte, interessant onderwerp!
De B4 weegt nu precies 6120 gram.
Volgens de fabrikant is het maximale vlieggewicht 8000 gram.
Dus ik heb nog behoorlijk veel speelruimte om te experimenteren met ballast.
Zodra alle instrumenten zijn ingebouwd volgt een periode van vele testvluchten op zoek naar het optimum.
Eenvoudig wordt het niet omdat ook geëxperimenteerd wordt met instelhoek en de positie van het zwaartepunt.
Om zo snel mogelijk resultaat de boeken werk ik volgens een vast schema.
De uitkomsten van de metingen worden in een excel spreadsheet verwerkt.
Als het maximaal haalbare is gevonden richt ik me op het mixen van alle roers en kleppen waarbij technisch gezien met de Multiplex Royal pro zender vele mogelijk is.
Het is al met al veel werk maar wel een uitdaging.
Johannes
Ariel
PH-SAM
Liefst zo klein mogelijk.
Hangt ook af van verscheidene parameters.
Soort toestel, windsterkte, om maar iets te zeggen.
De B4 romp komt met een instelhoekverschil van 0° uit de mal.
Dat vond ik opvallend en heb met de fabrikant daarover een uitvoerig gesprek gehad.
Of ik de 0° instelhoekverschil aanhoud is nog niet beslist, de resultaten van de testvluchten zullen beslissend zijn wat het wordt.
Johannes
Ariel
PH-SAM
Het is weer bijna één jaar gelden dat de verschillende sensoren voor de B4 geleverd werden. Dus hoogste tijd om deze in de B4 in te bouwen.
Gelukkig had ik ze in een plastic zakje opgeborgen want anders zouden de onderdelen onder een dikke laag stof zijn verdwenen.
Met de B4 heb ik tot nu toe weinig vluchten kunnen maken maar toch werd direct duidelijk dat er nog veel verbeterd kan worden.
Dus eindelijk de B4 ik uit het wandrek gehaald en begonnen met de werkzaamheden.
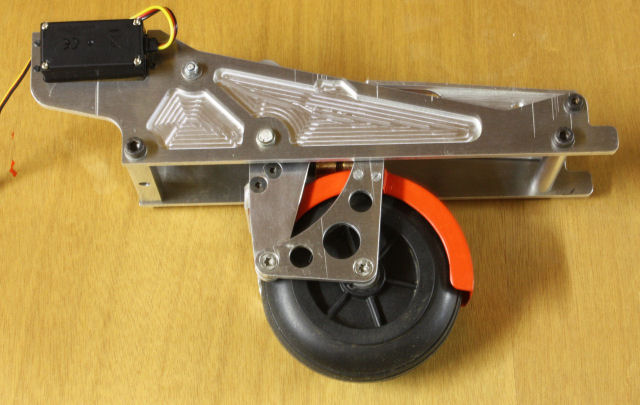
De eerste klus is het inbouwen van een staartwiel.
Daarvoor moest een gat in de romp gemaakt worden.

Het gekozen wiel is behoorlijk hard en daarom kommen er 4 stuks rubber dempers tussen romp en aluminium wielophanging.

De wielophanging wordt in een multiplex doosje vastgeschroefd.


Het doosje zit nu vast in de romp.
De kieren tussen romp en doosje zijn met epoxy dichtgesmeerd.
Ook het hout is met epoxy ingesmeerd en het geheel is nu waterdicht.

De alu wielophanging past precies op de dempers.

Met 4 borgmoeren zit de ophanging vast en kan indien nodig voor onderhoud makkelijk verwijderd worden.

Klaar, ik ben tevreden en het werkt zoals bedoeld.

De volgende belangrijke aanpassing was het vervangen van het hoogteroer servo.
Als vervanger komt een DES 586 BB met carbon tandwielen.
Kunststof tandwielen zijn kwetsbaarder dan metalen en daarom zit op de hevel een balanceergewicht (rood) om het massazwaartepunt zo goed mogelijk bij het servo draaipunt te krijgen. Extreme landingsstoten zullen nu minder zwaar op de tandwielen hameren.

Verder gaat het met de installatie van de airspeed sensor.
De stuwbuis zit nu voor in de romp en steekt ca.20 mm uit.
Binnen in de romp is voldoende ruimte om de silicone slang aan te sluiten.

Over de originele 16mm GFK vleugelverbinder ben ik niet tevreden.
Mijn buikgevoel zegt, niet meer gebruiken!
Die verbinder is best wel sterk en door de deze regelmatig te controleren op mogelijke beschadigingen zou het goed moeten gaan.
Maar elke keer als ik het toestel op de vlieglocatie aan het opbouwen was viel mij op dat de vleugelpen eigenlijk te kort was ten opzichte van de gatdiepte in de vleugel.
Het gevolg was dat de vleugelpen niet symmetrisch verdeeld zat. Meestal zat de pen in één vleugelgat tot de aanslag erin en daardoor bij de andere vleugel een stuk verwijderd van de aanslag.
Hm,... dit zat mij niet lekker omdat ik geen idee had hoe de vleugel is opgebouwd.
Dat mijn angst terecht was bleek na het zien van een aantal foto's op een Duits forum.
Als er toch een nieuwe vleugelpen moet gemaakt worden dan gelijk maar één met een v-stelling van 2° per kant zoals bij de 1:1 B4.

Dat er niet zomaar tijdens het vliegen de v-stelling plotseling negatief kan worden moet de vleugelpen tegen verdraaiing geborgd worden.
Een stalen pen van rond 4mm dient als borging tegen verdraaien van de vleugelpen.
Hier in gemonteerde toestand. De borgpen is makkelijk bereikbaar en na het sluiten van de cockpitkap kan hij niet meer eruit vallen.

De vario/hoogtemeter, spannings en airspeedsensor hebben een plek gekregen.
Zo, dit mag weer terug in het toestel en alle servo's mogen worden aangesloten.
Zender afstellen, telemetrie testen en wachten op geschikt weer voor de testvlucht!

Als alles goed gaat mag deze B4 mee naar de Gerlitzen!
Johannes
Gelukkig had ik ze in een plastic zakje opgeborgen want anders zouden de onderdelen onder een dikke laag stof zijn verdwenen.
Met de B4 heb ik tot nu toe weinig vluchten kunnen maken maar toch werd direct duidelijk dat er nog veel verbeterd kan worden.
Dus eindelijk de B4 ik uit het wandrek gehaald en begonnen met de werkzaamheden.
De eerste klus is het inbouwen van een staartwiel.
Daarvoor moest een gat in de romp gemaakt worden.
Het gekozen wiel is behoorlijk hard en daarom kommen er 4 stuks rubber dempers tussen romp en aluminium wielophanging.
De wielophanging wordt in een multiplex doosje vastgeschroefd.
Het doosje zit nu vast in de romp.
De kieren tussen romp en doosje zijn met epoxy dichtgesmeerd.
Ook het hout is met epoxy ingesmeerd en het geheel is nu waterdicht.
De alu wielophanging past precies op de dempers.
Met 4 borgmoeren zit de ophanging vast en kan indien nodig voor onderhoud makkelijk verwijderd worden.
Klaar, ik ben tevreden en het werkt zoals bedoeld.
De volgende belangrijke aanpassing was het vervangen van het hoogteroer servo.
Als vervanger komt een DES 586 BB met carbon tandwielen.
Kunststof tandwielen zijn kwetsbaarder dan metalen en daarom zit op de hevel een balanceergewicht (rood) om het massazwaartepunt zo goed mogelijk bij het servo draaipunt te krijgen. Extreme landingsstoten zullen nu minder zwaar op de tandwielen hameren.
Verder gaat het met de installatie van de airspeed sensor.
De stuwbuis zit nu voor in de romp en steekt ca.20 mm uit.
Binnen in de romp is voldoende ruimte om de silicone slang aan te sluiten.
Over de originele 16mm GFK vleugelverbinder ben ik niet tevreden.
Mijn buikgevoel zegt, niet meer gebruiken!
Die verbinder is best wel sterk en door de deze regelmatig te controleren op mogelijke beschadigingen zou het goed moeten gaan.
Maar elke keer als ik het toestel op de vlieglocatie aan het opbouwen was viel mij op dat de vleugelpen eigenlijk te kort was ten opzichte van de gatdiepte in de vleugel.
Het gevolg was dat de vleugelpen niet symmetrisch verdeeld zat. Meestal zat de pen in één vleugelgat tot de aanslag erin en daardoor bij de andere vleugel een stuk verwijderd van de aanslag.
Hm,... dit zat mij niet lekker omdat ik geen idee had hoe de vleugel is opgebouwd.
Dat mijn angst terecht was bleek na het zien van een aantal foto's op een Duits forum.
Als er toch een nieuwe vleugelpen moet gemaakt worden dan gelijk maar één met een v-stelling van 2° per kant zoals bij de 1:1 B4.
Dat er niet zomaar tijdens het vliegen de v-stelling plotseling negatief kan worden moet de vleugelpen tegen verdraaiing geborgd worden.
Een stalen pen van rond 4mm dient als borging tegen verdraaien van de vleugelpen.
Hier in gemonteerde toestand. De borgpen is makkelijk bereikbaar en na het sluiten van de cockpitkap kan hij niet meer eruit vallen.
De vario/hoogtemeter, spannings en airspeedsensor hebben een plek gekregen.
Zo, dit mag weer terug in het toestel en alle servo's mogen worden aangesloten.
Zender afstellen, telemetrie testen en wachten op geschikt weer voor de testvlucht!
Als alles goed gaat mag deze B4 mee naar de Gerlitzen!
Johannes
Ariel
PH-SAM
Vandaag heb ik nog snel een spatscherm van vliegtuig multiplex gemaakt voor over het intrekbare wiel.
De laatste keer vliegen, het was extreem nat op het veld, slingerde het wiel de modder door de hele binnenkant van de romp.
Smerig, bah, nat en vies!
Morgen testen of deze spatscherm het vuil enigszins tegenhoudt.")

Johannes
De laatste keer vliegen, het was extreem nat op het veld, slingerde het wiel de modder door de hele binnenkant van de romp.
Smerig, bah, nat en vies!
Morgen testen of deze spatscherm het vuil enigszins tegenhoudt.
Johannes
Laatst bewerkt door een moderator:

Ariel
PH-SAM
Hier valt ook wat te testen... ;-) Het is nu een kwestie van uit trimmen en de accu een plaats geven.

Mooi man!
Tot morgen.

Johannes
De laatste keer vliegen, het was extreem nat op het veld, slingerde het wiel de modder door de hele binnenkant van de romp.
Smerig, bah, nat en vies!
Johannes
Nou idd ! Geinig opgelost. Mijn fixed wiel van mn KA6 werkt ook een heleboel troep de romp in, de romp lijkt na een dag vliegen wel een GFT bak. Kijken of ik ook zoiets kan verzinnen.
Ik ben heel erg benieuwd naar de uitvoering van het plan wat je hier schetst.De B4 weegt nu precies 6120 gram.
Volgens de fabrikant is het maximale vlieggewicht 8000 gram.
Dus ik heb nog behoorlijk veel speelruimte om te experimenteren met ballast.
Zodra alle instrumenten zijn ingebouwd volgt een periode van vele testvluchten op zoek naar het optimum.
Eenvoudig wordt het niet omdat ook geëxperimenteerd wordt met instelhoek en de positie van het zwaartepunt.
Om zo snel mogelijk resultaat de boeken werk ik volgens een vast schema.
De uitkomsten van de metingen worden in een excel spreadsheet verwerkt.
Als het maximaal haalbare is gevonden richt ik me op het mixen van alle roers en kleppen waarbij technisch gezien met de Multiplex Royal pro zender vele mogelijk is.
Het is al met al veel werk maar wel een uitdaging.
Johannes
Heb je al vluchten gelogd?
Is een verbetering zichtbaar?
Ariel
PH-SAM
Ik ben heel erg benieuwd naar de uitvoering van het plan wat je hier schetst.
Heb je al vluchten gelogd?
Is een verbetering zichtbaar?
Met mijn B4 heb ik nog weinig gevlogen, dus nog niet kunnen experimenteren.
Afgelopen zaterdag heb ik voor het eerst met een goed werkende speedsensor kunnen vliegen. Bij voorgaande vluchten werkte de sensor niet correct. De fout was snel gevonden.
De siliconen verbindingsslang tussen stuwbuis en sensor was geknikt.

Eerst moet ik vertrouwen krijgen in de speedsensor, is even wennen.
Daarom was ik zaterdag vooral bezig de glijvlucht van het toestel goed te observeren en regelmatig naar het zender display kijken welke snelheid er werd weergegeven.
Dat de B4 tijdens het rechtuit vliegen pompt wist ik al, maar hoe groot daardoor de schommelingen in snelheid zijn kon ik niet weten, nu wel.
Vanaf ca. 51 km/h begint de B4 te versnellen tot ca. 68 km/h, snelheid loopt weer terug tot ca. 51 km/h, ...enz.
De sensor onthoud van een vlucht de hoogst gemeten snelheid, op die dag was de hoogste snelheid 109 km/h. Eerlijk gezegd zag het niet zo snel uit.
Wat ik inmiddels wel geleerd heb is dat een snelheidsverandering van het toestel zeer snel gaat, sneller dan verwacht.
Interessant is, dat ik straks anders ga vliegen. Eerst voldoende snelheid maken en dan pas een bocht vliegen. Voor toestellen met een lage vleugelbelasting zal dat niet zoveel uitmaken, maar bij mijn B4 wel.
Intussen ben ik de Multiplex Bedienungsanleitung van mijn zender aan het leren.

Johannes
Ariel
PH-SAM
je weet het hé: als je twee servo's heb voor een functie: de linkse op het lager kanaal dan de rechtse ;-)
Inderdaad, zo moet dat, bedankt voor deze tip!
De ROYALpro, is mijn eerste computerzender. De zender instellingen voor mijn B4 heb ik zonder handboek gedaan. De servo's kreeg ik aan de gang, maar de mixers niet.

Toch maar de tijd genomen om het handboek door te lezen.
In begin snapte ik er weinig van, maar nu wordt het allemaal helder.
De servo - configuratie is nu volgends het handboek, MPX-UNI en dat werkt nu wel.
Johannes

Ik neem aan dat het pompen eenvoudig te herstellen is...? Heb je al duiktesten gedaan om te zien of het model netjes stabiliseert?Met mijn B4 heb ik nog weinig gevlogen, dus nog niet kunnen experimenteren.
Afgelopen zaterdag heb ik voor het eerst met een goed werkende speedsensor kunnen vliegen. Bij voorgaande vluchten werkte de sensor niet correct. De fout was snel gevonden.
De siliconen verbindingsslang tussen stuwbuis en sensor was geknikt.
Eerst moet ik vertrouwen krijgen in de speedsensor, is even wennen.
Daarom was ik zaterdag vooral bezig de glijvlucht van het toestel goed te observeren en regelmatig naar het zender display kijken welke snelheid er werd weergegeven.
Dat de B4 tijdens het rechtuit vliegen pompt wist ik al, maar hoe groot daardoor de schommelingen in snelheid zijn kon ik niet weten, nu wel.
Vanaf ca. 51 km/h begint de B4 te versnellen tot ca. 68 km/h, snelheid loopt weer terug tot ca. 51 km/h, ...enz.
De sensor onthoud van een vlucht de hoogst gemeten snelheid, op die dag was de hoogste snelheid 109 km/h. Eerlijk gezegd zag het niet zo snel uit.
Wat ik inmiddels wel geleerd heb is dat een snelheidsverandering van het toestel zeer snel gaat, sneller dan verwacht.
Interessant is, dat ik straks anders ga vliegen. Eerst voldoende snelheid maken en dan pas een bocht vliegen. Voor toestellen met een lage vleugelbelasting zal dat niet zoveel uitmaken, maar bij mijn B4 wel.
Intussen ben ik de Multiplex Bedienungsanleitung van mijn zender aan het leren.
Johannes