Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
ArduPilot Mega APM 2.5 | vragen
- Topicstarter flash1
- Startdatum
Alt hold zou gewoon moeten werken zonder gps. Naza kuren op apm heb ik nog nooit gehoord haha..Zal wel goed komen denk ik.
Baron en imu worden gebruikt bij alt hold. Werkt prima zonder GPS. Indoor dus ook")
Dacht ik al, kan ik even vooruit zonder. Genoeg te leren zonder GPS.
Van de GPS die ik nu heb is de connector en de printplaat plaatjes afgescheurd.
Welke vervangende GPS (niet 3DR) is aan te raden? Een uBlox variant?
Ow en dit vroeg iemand in PB, hoe ik de 6 modi in de DX6i heb geprogrammeerd:
http://diydrones.com/forum/topics/dx6i-3-position-mix-for-modes
Of deze met 2 mixers en 2 switches:
http://diydrones.com/forum/topics/spektrum-dx6i-mix-switch-and-arducopter
Plaatjes, uitleg. Werkt prima, welke modus onder welke knop is een kwestie van smaak.
Stablize als default met alle switches op neutraal is wel aan te raden.
Dan een klein kaartje/briefje op je zender plakken:
000 stablize
010 Alt hold
Etc (0=switch off, 1=switch on)
Tadango
Forum veteraan
Ik heb nu 2 van deze : House uBlox 6M GPS Module - NO mounting backplane
Zodra je ze iets van de zenders weg plaatst werken ze prima En dat voor 18 dollar.....
Zitten er op de print geen soldeer pads?
Zodra je ze iets van de zenders weg plaatst werken ze prima
En dat voor 18 dollar.....Zitten er op de print geen soldeer pads?
MinimOSD
Dag Heren,
Zou ik van jullie APM kennis gebruik mogen maken? Dan zal ik mijn best doen om een steentje bij te dragen en mijn probleem zo goed mogelijk uit te leggen;
Ik heb sinds vandaag de MinimOSD toegevoegd aan mijn setup, zie de onderstaande afbeelding;
Geordend;
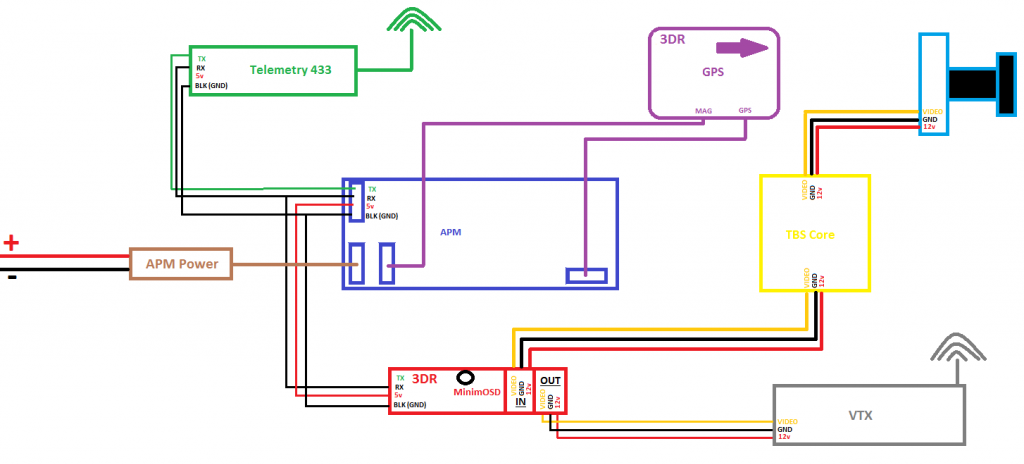
Under construction
Telemetry in werking

MinimOSD via VTX

Probleempje
Opzich werkt alles prima, wanneer ik met mijn computer een data verbinding maak met de telemetry ontvanger en APM toont de mission planner alles netjes. Ook de OSD reageert op alle info.
MAAR, Wanneer ik de APM opstart en géén telemetry verbinding heb opgestart wordt de OSD wel getoond maar reageert hij niet. Pas wanneer ik de telemetry verbinding initialiseer reageert het OSD ook. .
.
Dit is natuurlijk leuk wanneer je altijd je Telemetry aan hebt, maar dat is in mijn geval niet zo. Ik wil telemetry kunnen gebruiken wanneer ik draadloos wil tunen en verder wil ik enkel het MinimOSD gebruiken.
Waarschijnlijk heeft dit te maken met het TX signaal wat alleen mijn telemetry zender in gaat. Ik heb dit gedaan omdat dit beschreven staat in de wiki handleidingen.
https://code.google.com/p/arducam-osd/wiki/minimosd
Maar, ik wil ten allertijde ook gewoon mijn MinimOSD kunnen gebruiken zonder dat ik een telemetry connectie heb. Hebben jullie een idee? Ik durf niet zomaar de TX ook naar de MinimOSD te trekken.
Dag Heren,
Zou ik van jullie APM kennis gebruik mogen maken? Dan zal ik mijn best doen om een steentje bij te dragen en mijn probleem zo goed mogelijk uit te leggen;
Ik heb sinds vandaag de MinimOSD toegevoegd aan mijn setup, zie de onderstaande afbeelding;
Geordend;

Under construction

Telemetry in werking

MinimOSD via VTX

Probleempje
Opzich werkt alles prima, wanneer ik met mijn computer een data verbinding maak met de telemetry ontvanger en APM toont de mission planner alles netjes. Ook de OSD reageert op alle info.
MAAR, Wanneer ik de APM opstart en géén telemetry verbinding heb opgestart wordt de OSD wel getoond maar reageert hij niet. Pas wanneer ik de telemetry verbinding initialiseer reageert het OSD ook.
. Dit is natuurlijk leuk wanneer je altijd je Telemetry aan hebt, maar dat is in mijn geval niet zo. Ik wil telemetry kunnen gebruiken wanneer ik draadloos wil tunen en verder wil ik enkel het MinimOSD gebruiken.
Waarschijnlijk heeft dit te maken met het TX signaal wat alleen mijn telemetry zender in gaat. Ik heb dit gedaan omdat dit beschreven staat in de wiki handleidingen.
https://code.google.com/p/arducam-osd/wiki/minimosd
Maar, ik wil ten allertijde ook gewoon mijn MinimOSD kunnen gebruiken zonder dat ik een telemetry connectie heb. Hebben jullie een idee? Ik durf niet zomaar de TX ook naar de MinimOSD te trekken.
Oké, na lang zoeken heb ik de oplossing gevonden. Uiteindelijk heel simpel, maar waarschijnlijk is het door een software updaten afgelopen jaar zo simpel gemaakt.
Ik heb het probleem namelijk vaak kunnen terug vinden op het internet en hier werd vaak een soort van omweg / hack gegeven om het werkbaar te krijgen. Dit impliceerde wat soldeerwerk op het apm board.
De oplossing is als volgt, ga naar de mission planner en klik op initial setup. Daarna klik je op hardware, en uiteindelijk op OSD. Klik hier "enable telemetry"
Dit loste uiteindelijk mijn probleem op, wellicht logisch voor sommige maar je moet het maar weten. Het wordt niet beschreven in de minimOSD Wikipedia pagina.
Hoop dat we het forum weer wat rijker hebben gemaakt en jullie er iets aan hebben. Praktisch gezien toont me vorige post en deze de totale implementatie van een minimOSD.
Gr
Peter
Ik heb het probleem namelijk vaak kunnen terug vinden op het internet en hier werd vaak een soort van omweg / hack gegeven om het werkbaar te krijgen. Dit impliceerde wat soldeerwerk op het apm board.
De oplossing is als volgt, ga naar de mission planner en klik op initial setup. Daarna klik je op hardware, en uiteindelijk op OSD. Klik hier "enable telemetry"
Dit loste uiteindelijk mijn probleem op, wellicht logisch voor sommige maar je moet het maar weten. Het wordt niet beschreven in de minimOSD Wikipedia pagina.
Hoop dat we het forum weer wat rijker hebben gemaakt en jullie er iets aan hebben. Praktisch gezien toont me vorige post en deze de totale implementatie van een minimOSD.
Gr
Peter
Laatst bewerkt door een moderator:
Tadango
Forum veteraan
Afgelopen weekend was het niet echt vliegweer maar toch naar het veld gegaan. Ik was benieuwd hoe goed de APM kon vliegen. Dus een vliegroute ingesteld met start en landing op het veld. Ging erg netjes. Hij wil exact op het gemarkeerde punt landen. De punten ervoor had ik de hoogte al afgebouwd en dat klopte aardig. Hij komt heel mooi binnen en blijft netjes corrigeren tot hij op de grond ligt. Gas dicht ging ook goed nadat ik het minimale punt op 0% had gezet ipv 20%. Later komt er nog een pitobuis op en gaat het nog beter. Wellicht nog een sonar ook.
Tadango
Forum veteraan
Gaat eigenlijk heel goed zonder grote aanpassingen. Het is geen plug en play maar veel bijzonders hoef je er niet voor te doen. Het is een pitotbuis trouwens ") https://www.google.nl/search?q=pitotbuis Ben benieuwd hoe nauwkeurig de snelheids-meting dan is.
https://www.google.nl/search?q=pitotbuis Ben benieuwd hoe nauwkeurig de snelheids-meting dan is.
https://www.google.nl/search?q=pitotbuis Ben benieuwd hoe nauwkeurig de snelheids-meting dan is.

In een andere discussie was de vraag gesteld: Hoe gaat APM om met een failsafe en PPM?
Zo dus:
Nu eens checken of die defaults nu zorgen dat hij landt of RTL uitvoert...
En wat het solderen en modificeren inhoudt (en of dit nodig is)
Zo dus:
Operation of Failsafe using a PPM Sum Receiver
If the APM is connected to a PPM Sum receiver in pass-through mode (APM input pins 2&3 shorted) the APM’s PPM encoder operates transparently.
There is no independent channel analysis and there is no channel manipulation.
If the receiver is disconnected or the PPM signal is cut off, after a 250 ms timeout the PPM encoder watchdog interrupt will start an 8 channel PPM-PWM generator with the following fail-safe values :
CH1, CH2, CH4, CH6, CH7, CH8 = 1500
CH3 = 900
CH5 = 1555 (flight mode 4)
If an input level change is again detected from the PPM receiver the fail-safe output is terminated and normal PPM pass-through operation is restored.
Alternatively, there is a provision on the APM 2.5 board to fully bypass the PPM encoder when using a PPM-Sum receiver..
The PPM signal is connected to APM 2.5 board’s input CH5 (instead of CH1 for pass through).
Also, a pad needs to be modified on the APM 2.5 board and soldering is required.
Nu eens checken of die defaults nu zorgen dat hij landt of RTL uitvoert...
En wat het solderen en modificeren inhoudt (en of dit nodig is)
Blijkbaar stuurt mijn Graupner een 50hz signaal via PPM als fail safe optreedt.
Wilde uitvogelen of en welke gevolgen dat heeft.
En:
APM 3.1 is uit!
De wijzigngen zie je hier:
ArduCopter-3.1 released! - DIY Drones
Let op:
Warning #1: Motors will spin (slowly) by default as soon as the copter is armed! You can switch this feature off by setting the MOT_SPIN_ARMED parameter to zero.
Opvallend is de GPS failsafe:
Wilde uitvogelen of en welke gevolgen dat heeft.
En:
APM 3.1 is uit!
De wijzigngen zie je hier:
ArduCopter-3.1 released! - DIY Drones
Let op:
Warning #1: Motors will spin (slowly) by default as soon as the copter is armed! You can switch this feature off by setting the MOT_SPIN_ARMED parameter to zero.
Opvallend is de GPS failsafe:
AC3.1 and higher include GPS glitch protection which can help alert the pilot to a bad GPS position, trigger a failsafe and reduce the incidents of fly-aways. Glitches are detected by comparing the each new position update received from the GPS with a position projected out from the previous update’s position and velocity. The new position is accepted as “good” if:
Failsafe stel je in in software. Solderen? Dat is nergens voor nodig. RTL of landen kan je allemaal instellen ook. Simpelweg ontvanger gas kanaal beneden de 975 laten komen bij failsafe en het werkt.
Hoi Tandango, toevallig heb ik dit laatst geprobeerd met mijn TBS en Turnigy 9X met ER9X software en FRSKY module.
De failsafe die benoemd is inderdaad Throttle failsafe, echter werkt deze bij mij niet of ik mis een stap. Wanneer ik op dit moment mijn afstandsbediening uit zet blijft mijn gas op exact hetzelfde niveau als waar die op stond wanneer je gas op het laagste positie had staan. (hij verspringt dus niet)
De laagste positie van mijn gas is gelijk aan waarde die ik ingesteld heb in de radio calibration waar aanbevolen 1100 - 1900 waardes zijn. Mijn radio is dus ook ingesteld dat mijn throttle level niet lager kan dan 1100 door middel van % range instellen in de afstandsbediening.
Kun je iets vertellen over het bovenstaande? Mis ik een stap?
Hartelijk bedankt! Hoop dat je me kunt helpen.
APM 3.1 is uit!
De wijzigngen zie je hier:
ArduCopter-3.1 released! - DIY Drones
Let op:
Warning #1: Motors will spin (slowly) by default as soon as the copter is armed! You can switch this feature off by setting the MOT_SPIN_ARMED parameter to zero.
Opvallend is de GPS failsafe:
Bedankt voor dit bericht! Goede info!