Omdat ik er een hekel aan heb als het bovenop zit ")
Bij de servo's zitten skidjes maar maak voorop ook nog wel iets.
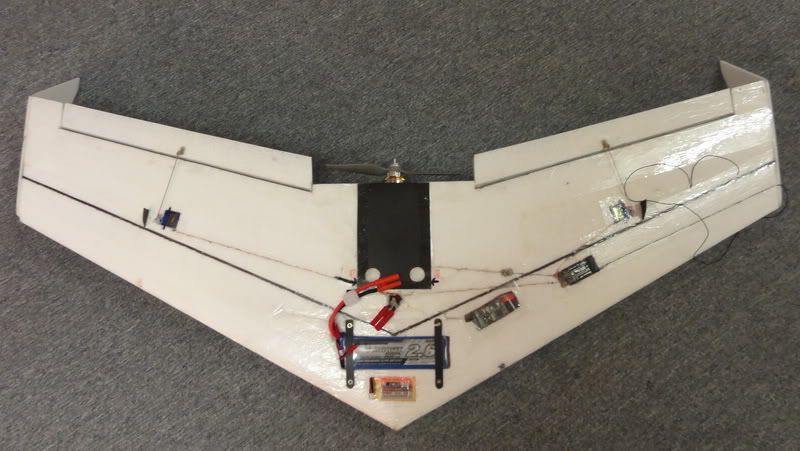
Hoopte de accu dieper te krijgen maar helaas is het profiel niet dikker.
De onderkant is volledig vlak dus alles kon er zo mooi in en bovenop ben je dan toch de ronding kwijt. En wou juist een beetje stroomlijn behouden.
Misschien maak ik nog wel een afdekplaatje van CF voor de accu. Alleen klittebandje vind ik voor een accu van dit gewicht ook niet genoeg. Op de foto zat er plakband overheen.
Na de crash zat ie nog netjes op zn plaats.
Inmiddels alles gemaakt en behoorlijk extra getaped.
Domping nog niet gemeten maar in ieder geval 5mm opgevuld aan de onderkant.
Vandaag geen tijd gehad dus volgende vlucht zal ergens deze week worden. Nou ja hopen dat het vliegt dan maar.
Bij de servo's zitten skidjes maar maak voorop ook nog wel iets.
Hoopte de accu dieper te krijgen maar helaas is het profiel niet dikker.
De onderkant is volledig vlak dus alles kon er zo mooi in en bovenop ben je dan toch de ronding kwijt. En wou juist een beetje stroomlijn behouden.
Misschien maak ik nog wel een afdekplaatje van CF voor de accu. Alleen klittebandje vind ik voor een accu van dit gewicht ook niet genoeg. Op de foto zat er plakband overheen.
Na de crash zat ie nog netjes op zn plaats.
Inmiddels alles gemaakt en behoorlijk extra getaped.
Domping nog niet gemeten maar in ieder geval 5mm opgevuld aan de onderkant.
Vandaag geen tijd gehad dus volgende vlucht zal ergens deze week worden. Nou ja hopen dat het vliegt dan maar.










") )
)
