Goed, bij deze dan m'n reactie op de vraag of je beter je motor- of accudraden kunt verlengen. Voordat ik toekom aan het beantwoorden van die vraag lijkt het mij nuttig een aantal zaken op een rijtje te zetten waarbij ik bij het begin wil beginnen.
Borstelmotoren
Zoals velen ben ik begonnen in RC vliegerij met borstelmotoren, de bekende Speed 380 en Speed 400 Mabuchi types die ook vandaag de dag nog gebruikt worden (Multiplex levert nog steeds deze borstelmotoren bij veel van hun bouwkits). Mijn eerste modellen voorzien van borstelmotoren hadden nog geen regelbaar toerental maar waren voorzien van een RC schakelaar met een flink relais dat heel banaal de motor aan of uit schakelde.
Eén van de problemen met borstelmotoren wordt veroorzaakt door de opbouw ervan. De rotor (het draaiende deel) van een borstelmotor bestaat namelijk uit een blikpakket met daarop een aantal spoelen gewikkeld (deze fungeren als elektromagneten) en een collector (een reeks contacten) waarop die spoelen zijn aangesloten. In combinatie met sleepcontacten of koolborstels worden deze spoelen van elektrische energie voorzien en wekken een elektromagnetisch veld op. Door de aanwezigheid van permanente (ferriet)magneten in het huis van de motor gaat de rotor draaien, dit alles door het principe van elkaar afstotende en aantrekkende magneetvelden.
Helaas zorgt deze opbouw voor nogal wat problemen voor gevoelige elektronica en dan vooral de RC ontvanger. De collector en de sleepcontacten/koolborstels die eroverheen bewegen zorgen namelijk voor vonkoverslag en dit resulteert in een zeer breedbandig spectrum aan frequenties die een weg naar buiten vinden primair door de motordraden (conductie en radiatie). Hierdoor kan de RC ontvanger stoorsignalen te zien krijgen die vallen in dezelfde frequentieband als waar deze op afgestemd is. In het ergste geval zal de RC ontvanger niet meer betrouwbaar werken, maar meestal is een (significante) reductie in bruikbaar RC vliegbereik het resultaat. Dit is simpelweg te vergelijken met twee RC zenders die op hetzelfde kanaal staan afgesteld, een betrouwbare besturing door één van de RC zenders is dan niet te garanderen omdat de andere RC zender 'in de weg zit', stoorsignalen werken geheel analoog hieraan.
Om inzicht te krijgen in de overdracht van de stoorsignalen is het belangrijk om onderscheid te maken tussen de twee belangrijke mechanismes (conductie en radiatie) die zorgdragen voor het transport van deze stoorsignalen:
Conductie is het transport van een (wissel)spanning door een geleider. In het geval van de breedbandige storing zoals bij een borstelmotor wordt een wisselspanning gesuperponeerd op de gelijkspanning vanuit de accu en/of snelheidsregelaar. Dit zie je bijvoorbeeld ook terug bij schakelende BEC's, het residu van de schakelfrequentie (en de harmonischen, veelvouden van de schakelfrequentie) zie je terug bovenop de gelijkspanning van de BEC.
Radiatie is het transport van een (wissel)spanning door een elektromagnetisch veld (EM veld). In het geval van de breedbandige storing zoals bij een borstelmotor dat door de motordraden als EM veld wordt gegenereerd resulteert dit in een wisselspanning die wordt opgewekt in een nabij gelegen geleider door inductie. De opgewekte wisselspanning is direct evenredig met de sterkte van het EM veld en dus met de afstand tot de motordraden.
Ontstoring
Uiteraard kunnen we maatregelen nemen om beïnvloeding door deze storing te verminderen. Door kleine (10...100nF) keramische condensatoren over de motor aansluitingen en van motor aansluiting naar motor behuizing te plaatsen kan deze breedbandige storing flink worden gereduceerd. Sterker nog, door het plaatsen van een LC (spoel met condensator) filter met een kantelpunt ruim onder de frequentie gebruikt voor de RC besturing vlak voor de motor is deze storing zeer effectief te bestrijden. Toen borstelmotoren nog populair en veelgebruikt waren had iedere fabrikant wel een dergelijk LC filter in z'n programma.
De beste oplossing is echter een combinatie van maatregelen; het kort houden van de motordraden om het EM veld te verkleinen. Het zoveel mogelijk fysiek scheiden van de borstelmotor en regelaar van de RC ontvanger en het ontstoren van de borstelmotor met kleine condensatoren. Hiermee bestrijd je feitelijk de twee effecten die ten grondslag liggen aan de opgewekte breedbandige storing door de borstelmotor (conductie en radiatie). De borstelmotor zal namelijk primair via de motordraden de storing naar buiten brengen, hierdoor zal dus via conductie, geleiding via de motordraden maar ook via radiatie van het elektromagnetisch veld (EM veld) rondom de motordraden de storing een weg vinden naar andere elektronica.
Door het fysiek zoveel mogelijk scheiden van motor en regelaar en gevoelige elektronische onderdelen zoals de RC ontvanger geef je beïnvloeding via radiatie van het EM veld veel minder kans. Met elke verdubbeling van de afstand wordt het geïnduceerde voltage namelijk met een faktor vier verminderd (6dB), kortom, met de motor en regelaar in de neus en de RC ontvanger in de staart is dit probleem in de regel verholpen.
Met het ontstoren van de motor zelf door het plaatsen van de condensatoren sla je in feite twee vliegen in één klap. Je vermindert de storing die zich als wisselstroom superponeert op de gelijkstroom die aan de motor wordt aangeboden, daarmee wordt echter ook de radiatie van deze storing als EM veld via de motordraden verminderd omdat de wisselstroom van de storing in amplitude wordt verkleind.
Een andere belangrijke tactiek in het terugdringen van het via radiatie van het EM veld opgewekte storing bij borstelmotoren is het kort houden van de motordraden en deze in elkaar te draaien (twisten). Dit is logisch omdat de lengte van het opgewekte EM veld direct evenredig is met de lengte van de geleider waardoor een stroom loopt. Hoe langer de geleider hoe langer ook het opgewekte EM veld, het strekt zich immers uit over de gehele lengte van de geleider. Dus hoe korter de geleider, hoe korter ook het EM veld. Door de geleiders die zorgen voor de aan- en afvoer van elektronen te twisten kan je feitelijk het EM veld tot bijna nul reduceren. Dit geldt bij borstelmotoren dus voor de motordraden, maar ook de accudraden.
Frequentie RC besturing
Met de opkomst van 2.4GHz voor RC besturing zijn veel van de storingen die op 35MHz voor problemen zorgden verleden tijd, simpelweg omdat de frequentie van de RC besturing veel hoger is en de frequenties in de breedbandige storing van een borstelmotor veroorzaakt door vonkoverslag in veel gevallen niet zo hoog komen. Ook is de robuustheid van dit type besturing hier debet aan, waarbij met diverse controle mechanisme's (CRC, redundancy, etc.) de integriteit van de ontvangen signalen (feitelijk data pakketten) wordt gewaarborgd. Dit betekent natuurlijk niet dat bij een model met borstelmotor wat duidelijk storing gaf op 35MHz en nu vrij van storing is op 2.4GHz de oorzaak van deze storing opeens verdwenen is.
Met deze kennis in het achterhoofd kunnen we eens gaan kijken wat er verandert bij het gebruik van borstelloze motoren.
Borstelloze motoren
Feitelijk zijn borstelloze motoren omgekeerde borstelmotoren, de stator met de daarop gewikkelde spoelen (elektromagneten) staan stil en de permanente magneten zijn bevestigd aan de rotor en draaien rond. Uiteraard dienen we dan de elektromagneten aan te sturen zodat er een draaiveld wordt gecreëerd waardoor de rotor met de magneten links of rechtsom kan gaan draaien, dit alles wordt verzorgd door de borstelloze regelaar (ESC).
Voor het opwekken van het draaiveld worden borstelloze motoren in de regel aangestuurd met draaistroom, waarbij de diverse spoelen gewikkeld rondom de stator in successie worden aangestuurd. Hierdoor zullen de permanente magneten in de rotor dit draaiende magneetveld blijven volgen en zal dus de as van de motor blijven draaien. De aansturing van de elektromagneten wordt in de regel verzorgd door MOSFET's, dit zijn halfgeleider componenten die (vooral) uitblinken in het verliesarm schakelen van hoge stromen (zeer lage Rdc) in een zeer kort tijdsbestek (ettelijke nanoseconden).
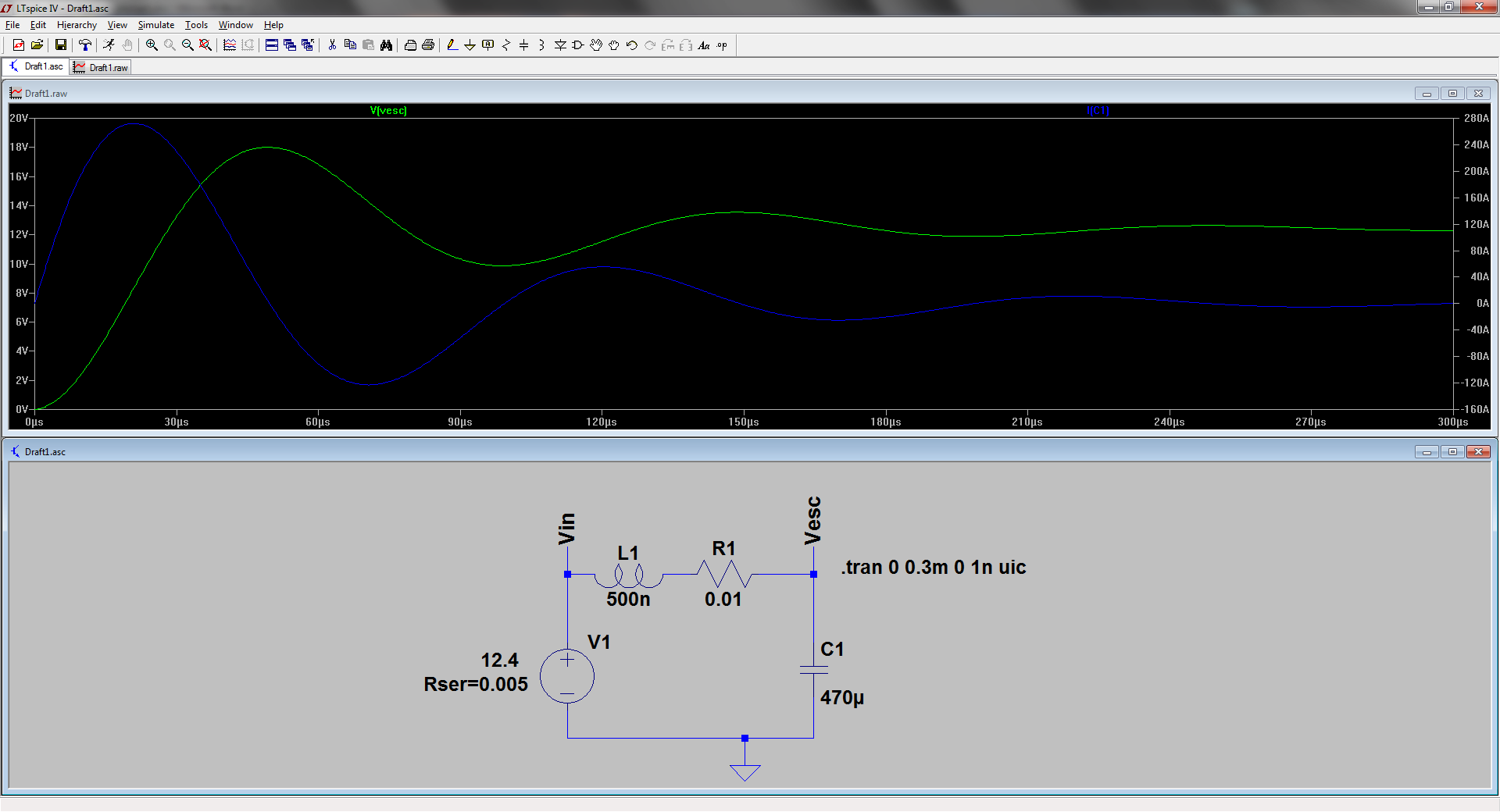
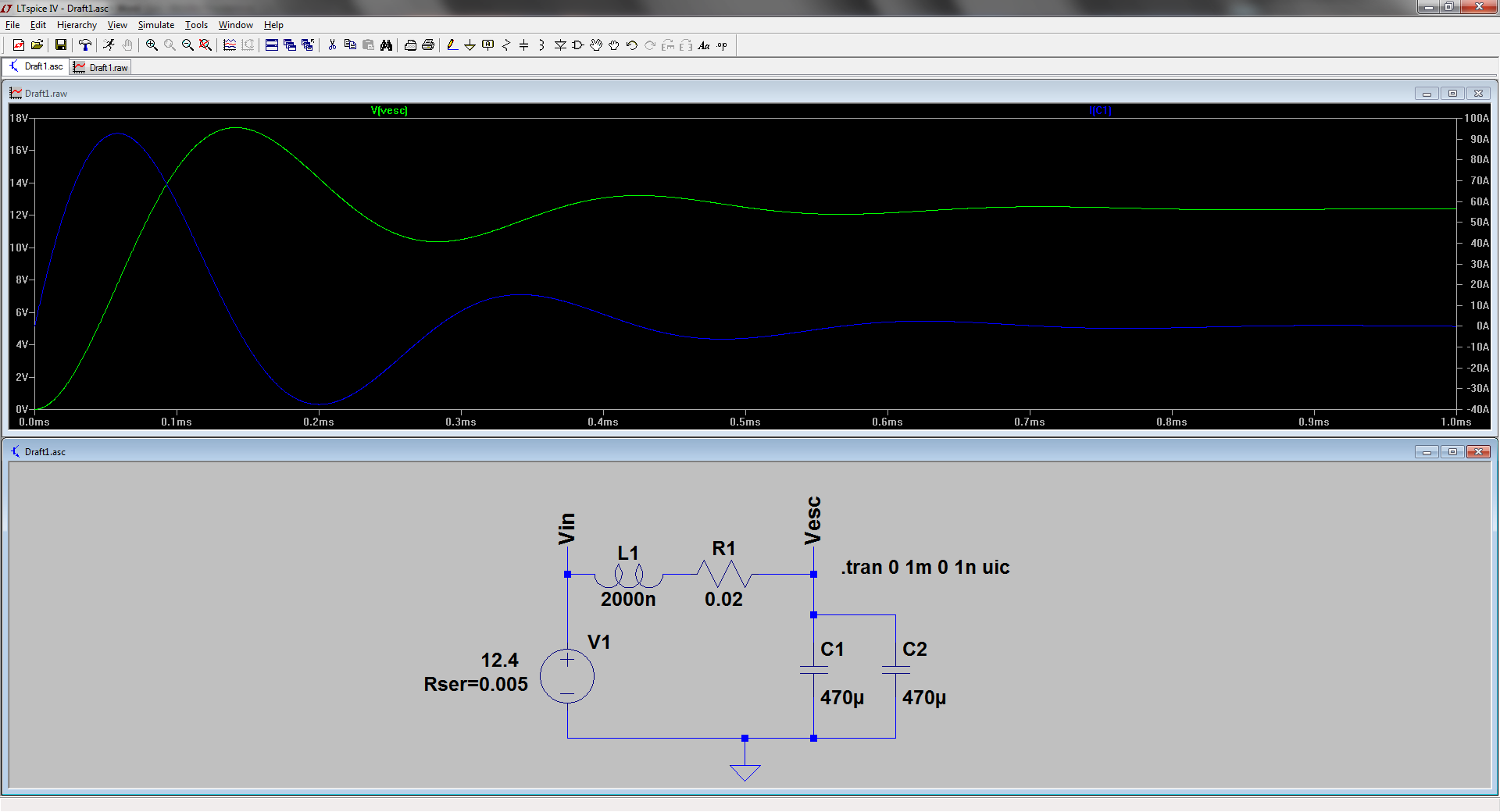
Daarmee zijn we meteen bij de kern van het probleem wat we terugzien bij borstelloze motoren aangekomen. Door het in zeer kort tijdsbestek aan- en uitschakelen (nanoseconden) van de elektromagneten is de helling van de op- en neergaande flank van de stroom (en daarmee ook de spanning, R=V/I) door de elektromagneet bijzonder steil. Dit begrip wordt aangeduid met slew-rate en normaliter uitgedrukt in V/us (volt per microseconde). Door deze hoge slew-rate en het feit dat we geen Ohmse belasting (vervangbaar door een vaste weerstand van x Ohm) aansturen maar een spoel die zowel een Ohms and inductief karakter heeft zal er opslingering plaatsvinden en zal in overeenstemming met het Nyquist theorem gelden dat de frequentiecomponenten in de (bij benadering) blokgolf die de spanning/stroom definieert door de elektromagneet een veelvoud zijn van de frequentie die normaliter gebruikt wordt voor de aansturing.
Dus ondanks het feit dat de ESC de borstelloze motor aanstuurt met een gangbare 8, 16 of 32kHz zullen er door het zeer korte in- en uitschakelgedrag (let wel, dit zegt niets over de duur van de bekrachtiging van de elektromagneet, alleen over het in- en uitschakelen) harmonischen worden gegenereerd die veel hoger zijn dan de frequentie van aansturing door de ESC. Feitelijk is er door de opslingering sprake van ringing die ik hier omwille van het eenvoudig willen houden van deze reactie even laat voor wat hij is. Echter volgens Gibbs (
Gibbs phenomenon - Wikipedia, the free encyclopedia) en ook in de praktijk blijkt dat zelfs een berekening van de harmonischen volgens Nyquist onvoldoende is, en er veel meer harmonischen en restproducten van oscillaties zich in het signaal zullen laten zien.
Kortom, in een borstelloze motor wordt door de aansturing ervan een zeer breedbandig spectrum aan frequenties geproduceerd die netzoals bij een borstelmotor primair via de motordraden een weg naar buiten vindt. Dit gebeurt wederom via conductie, maar ook via radiatie. Omdat dit weer analoog aan de borstelmotor z'n weerslag heeft op gevoelige elektronische onderdelen zoals de RC ontvanger is het dus verstanding om de motordraden ook bij een borstelloze motor kort te houden. Alle effecten van conductie en radiatie zoals ik het uiteengezet voor een borstelmotor gelden hier ook, dus ook de bestrijding ervan is analoog aan de borstelloze motor.
Echter één ding is duidelijk anders. Vaak wordt aangeraden om bij een borstelloze motor de motordraden te twisten. De gedachte erachter is dat gelijk aan een borstelmotor de aan- en afvoer van de elektronen zorgt voor een significante vermindering van het EM veld. Bij borstelloze motoren gaat deze vlieger echter niet op. Om de eenvoudige reden dat als twee geleiders in elkaar gedraaid worden met de intentie het EM veld te verminderen de stroom (I) in de aan- en afvoer gelijk dient te zijn (!) zowel in sterkte (A), maar ook in fase (voor- of naloop). Bij borstelloze motoren is dit niet het geval omdat er een draaiveld wordt aangelegd. Dus de drie draden zullen constant wisselen in de rol van aan- en afvoer en fase. Hierdoor zal dus geen vermindering van het EM veld optreden maar een beïnvloeding van de timing en aansturing van de borstelloze motor door de ESC.
De ESC is namelijk afhankelijk van de tegen EMK van de wikkeling die is afgeschakeld om de timing en positie van de rotor te bepalen, de opgewekte tegen EMK (spanning <Vbatt) is namelijk een maat voor de positie van de rotor en de magneten die eraan zijn bevestigd. Door nu de draden te twisten zal het EM veld van een bekrachtigde wikkeling direct door middel van inductie (EM veld) een spanning opwekken in de andere motordraden. Deze spanning kan in fase verschillen van de tegen EMK en deze als zodanig gedeeltelijk opheffen, of juist eerder optreden dan de tegen EMK, waardoor een juiste timing van de motor niet valt te garanderen, daarmee kan de motor gaan stotteren of zelfs compleet stilvallen of andersom gaan draaien. Kortom, bij borstelloze motoren is het devies het kort houden van de motordraden en deze bij voorkeur niet twisten. In elkaar draaien mag, maar echt vlechten of strak twisten geeft mogelijk problemen met timing.
Daarmee kom ik gelijk uit bij de vraag of het verstandig is de motordraden te verlengen? Uit bovenstaande blijkt dat het verlengen van de motordraden zorgt voor een veel sterkere emissie van een EM veld met daarin een zeer breedbandig spectrum aan frequenties die mogelijk direct of indirect storen op de RC ontvanger of andere gevoelige elektronica. Ook heeft het verlengen van de motordraden een negatief effect op de tegen EMK en beïnvloeding daarvan doordat de veel langere motordraden ook een effectief hogere inductiespanning opwekken in naburige motordraden waardoor de motor timing in de war kan raken, zeker wanneer de lange draden nog eens getwist zijn, de koppeling van de EM velden is nu maximaal.
Ook bij borstelloze motoren geldt uiteraard dat de accudraden wél getwist kunnen worden en dat dit zeker voordelen heeft om het EM veld te verkleinen. Op de accudraden staat namelijk de door een (buffer) condensator afgevlakte som van alle aan de kant van de borstelloze motor opgewekte stromen. Echter de aan- en afvoer zijn hier wel gelijk in getal en dus zal het twisten, of dicht tegen elkaar aan plaatsen het EM veld significant reduceren.
Om deze reactie enigzins leesbaar te houden knip ik 'm hier even in twee stukken en ga ik verder met de vraag of het raadzaam is om de motordraden of de accudraden te verlengen in mijn volgende reactie.
Met vriendelijke groet,
Sander Sassen
ImmersionRC - Real Virtuality
")