Dit weekend heb ik tijdens de FPV meet 'n greet een aantal mensen hun eerste meters FPV leren vliegen met de E-sky Nemo, nu waren er wat vragen over de modificaties en de setup etc. dus hier even een kort bouwverslag met de belangrijkste ingrediënten. Ik gebruik geen richtingsroer, dus dat scheelt je een servo, maar uiteraard kan je die er wel inbouwen als je dat prettiger vliegen vindt.
Wat heb je nodig?
- E-sky Nemo (25-euro bij RCTechnics)
- 2x HXT2030 3500kV brushless motoren (HobbyCity)
- 2x Turnigy Plush 10A ESC's (HobbyCity)
- 3x HXT900 servo's (HobbyCity)
- 2x 5x5 prop met 2.3mm propadapter (HobbyCity)
- 1x ... 5x 2S/1300 20C LiPo (HobbyCity)
- 1x 10mW 2.4GHz ImmersionRC audio/video zender
- 1x CCD camera, b.v. een CX-161 (eBay)
- 1x 35MHz 4 of 6 kanaals ontvanger

Bovenstaande foto geeft hopelijk een goede indruk. Het is een tweemotorig model geworden met twee 3500kV binnenlopers, ieder voorzien van een 5x5 prop en z'n eigen 10A regelaar.
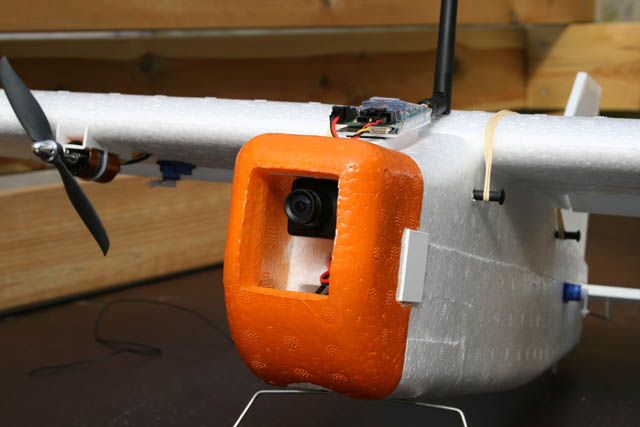
De camera (een KX-131) is verstopt in de neus en zit vast aan 't neuskapje dat d.m.v. twee neo magneten en twee U-vormige stukken blik verlijmd in de romp op z'n plek blijft zitten.
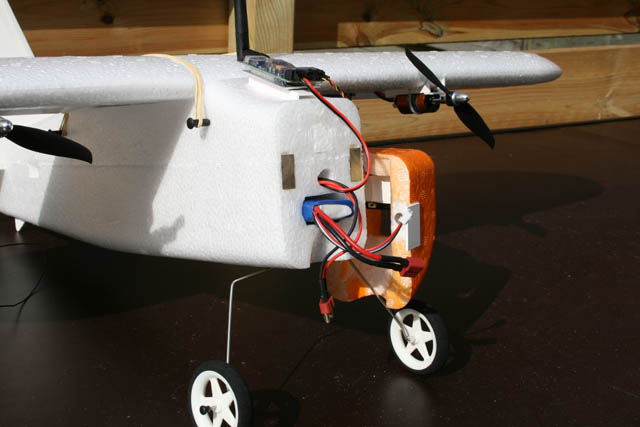
Normaliter heeft de Nemo een motor in de neus, daarmee is 't zwaartepunt gemakkelijk goed te krijgen. In dit geval moest ik een opening voor de LiPo (2S/1300) uitsnijden in de neus zodat 't zwaartepunt klopt met de originele Nemo.
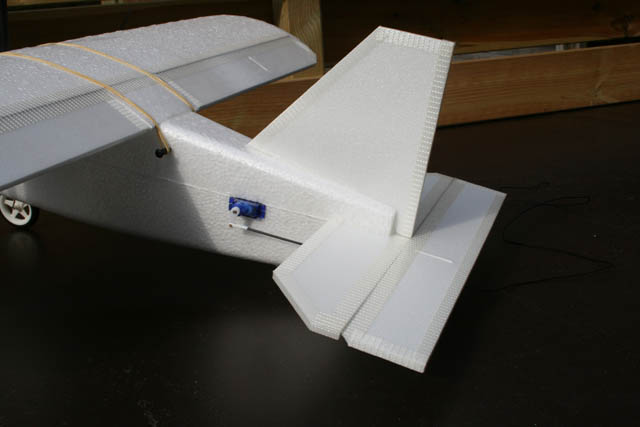
De stuurvlakken in de staart heb ik vervangen door 6-mm depron, voorzien van glasvezeltape rondom voor de stevigheid. Anders zitten er binnen de kortste keren allerhande butsen en inkepingen in 't depron en da's zonde.

Ook de rolroeren heb ik vervangen door depron, en ze gelijk iets groter gemaakt. Daarbij heb ik ook nog een 8x1-mm stuk CF platstaf in de vleugel gelijmd, zodat deze wat minder doorbuigt.
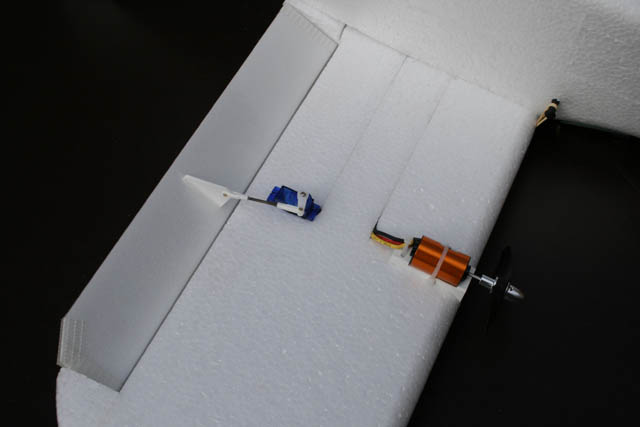
Op bovenstaande foto is goed te zien dat er per rolroer één servo is gebruikt (HXT900) en dat de motoren onder de vleugel zijn gemonteerd en vastzitten met een tweetal tie-wraps. Ik doe dit bewust zodat de tie-wraps 't breekpunt zijn en dus niet de hele motormount uit de vleugel scheurt.
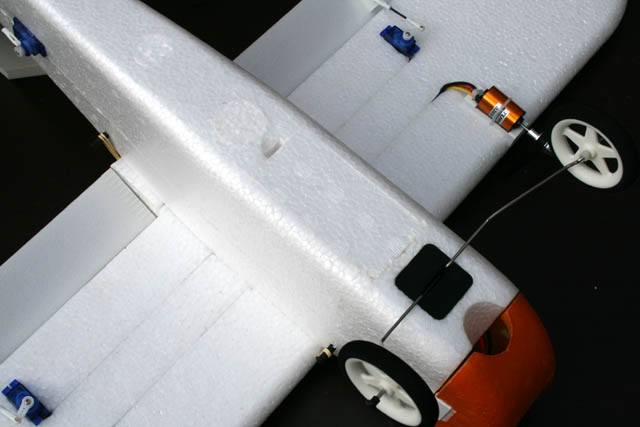
Het originele batteriecompartiment heb ik dichtgelijmd met een stuk EPP, zodoende zorgt dat niet voor extra luchtweerstand en komt er ook geen rotzooi in. Het landigsgestel laat ik voorlopig even zitten, het ziet er wel leuk uit zo met de iets grotere foam wielen.
Met vriendelijke groet,
Sander Sassen
ImmersionRC - Real Virtuality
Wat heb je nodig?
- E-sky Nemo (25-euro bij RCTechnics)
- 2x HXT2030 3500kV brushless motoren (HobbyCity)
- 2x Turnigy Plush 10A ESC's (HobbyCity)
- 3x HXT900 servo's (HobbyCity)
- 2x 5x5 prop met 2.3mm propadapter (HobbyCity)
- 1x ... 5x 2S/1300 20C LiPo (HobbyCity)
- 1x 10mW 2.4GHz ImmersionRC audio/video zender
- 1x CCD camera, b.v. een CX-161 (eBay)
- 1x 35MHz 4 of 6 kanaals ontvanger
Bovenstaande foto geeft hopelijk een goede indruk. Het is een tweemotorig model geworden met twee 3500kV binnenlopers, ieder voorzien van een 5x5 prop en z'n eigen 10A regelaar.
De camera (een KX-131) is verstopt in de neus en zit vast aan 't neuskapje dat d.m.v. twee neo magneten en twee U-vormige stukken blik verlijmd in de romp op z'n plek blijft zitten.
Normaliter heeft de Nemo een motor in de neus, daarmee is 't zwaartepunt gemakkelijk goed te krijgen. In dit geval moest ik een opening voor de LiPo (2S/1300) uitsnijden in de neus zodat 't zwaartepunt klopt met de originele Nemo.
De stuurvlakken in de staart heb ik vervangen door 6-mm depron, voorzien van glasvezeltape rondom voor de stevigheid. Anders zitten er binnen de kortste keren allerhande butsen en inkepingen in 't depron en da's zonde.
Ook de rolroeren heb ik vervangen door depron, en ze gelijk iets groter gemaakt. Daarbij heb ik ook nog een 8x1-mm stuk CF platstaf in de vleugel gelijmd, zodat deze wat minder doorbuigt.
Op bovenstaande foto is goed te zien dat er per rolroer één servo is gebruikt (HXT900) en dat de motoren onder de vleugel zijn gemonteerd en vastzitten met een tweetal tie-wraps. Ik doe dit bewust zodat de tie-wraps 't breekpunt zijn en dus niet de hele motormount uit de vleugel scheurt.
Het originele batteriecompartiment heb ik dichtgelijmd met een stuk EPP, zodoende zorgt dat niet voor extra luchtweerstand en komt er ook geen rotzooi in. Het landigsgestel laat ik voorlopig even zitten, het ziet er wel leuk uit zo met de iets grotere foam wielen.
Met vriendelijke groet,
Sander Sassen
ImmersionRC - Real Virtuality








") .
.
") )
)
 ) met virtual dub. Hopen dat het nu wel een keer lukt om er wat moois van te maken.
) met virtual dub. Hopen dat het nu wel een keer lukt om er wat moois van te maken.