Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Electro ombouw SSM-Technik Huey
- Topicstarter jdejager
- Startdatum
Hoe zit het dan met je toerental (sorry als ik domme vragen stel) want ik heb altijd begrepen dat je vrijlopende motortoerental min of meer lineair is met de regelaar-aansturing. Of is dat met active freewheel ook niet meer zo?
Wat voor toerentallen draai je dan op die 12% vergeleken met 100%
Groet, Bert
Wat voor toerentallen draai je dan op die 12% vergeleken met 100%
Groet, Bert
laurens
Forum veteraan
Dit verloopt niet linear nee, op 12% heb ik dus 1450 rpm. Op ongeveer 50% heb ik dacht ik 1900 rpm.
Ik ben pas net bezig met zo'n groot mogelijk bereik qua toeren te hebben, ik ga binnenkort verder kijken wat met de Voodoo kan. Met het tandwiel 1 tandje kleiner zou ik echt een heel goed bereik moeten hebben, alleen dan weet ik niet hoe goed de regelaar bijregelt bij het maximale toerental.
Ik ben pas net bezig met zo'n groot mogelijk bereik qua toeren te hebben, ik ga binnenkort verder kijken wat met de Voodoo kan. Met het tandwiel 1 tandje kleiner zou ik echt een heel goed bereik moeten hebben, alleen dan weet ik niet hoe goed de regelaar bijregelt bij het maximale toerental.
Ah, OK, dat is dan ook weer nieuw voor mij....
Bij wedstrijd gebruik kan ik me nog iets voorstellen dat je lagere toeren draait in hooverfiguren en hogere toeren in de krachtfiguren, maar voor JdeJager is dat verder irrelevant: Schaalheli's willen over het algemeen maar één toerental hebben, of in elk geval, er is niks aan voordeel te behalen met een variabel toerental.
Maar zo'n regelaar maakt het wel stukken makkelijker het juiste toerental te vinden zonder dat je gelijk naar de winkel moet rennen voor andere pinions of motoren...
Groet, Bert
Bij wedstrijd gebruik kan ik me nog iets voorstellen dat je lagere toeren draait in hooverfiguren en hogere toeren in de krachtfiguren, maar voor JdeJager is dat verder irrelevant: Schaalheli's willen over het algemeen maar één toerental hebben, of in elk geval, er is niks aan voordeel te behalen met een variabel toerental.
Maar zo'n regelaar maakt het wel stukken makkelijker het juiste toerental te vinden zonder dat je gelijk naar de winkel moet rennen voor andere pinions of motoren...
Groet, Bert
Heb een interessant filmpje op Youtube gezien waarin de werking van Active Freewheeling heel duidelijk wordt uitgelegd. In tegenstelling wat bovenstaat wordt de accu niet bijgeladen.
De regelaar stuurt de motor aan met pulsen (PWM), hiermee krijg je een gemiddelde spanning op de motor. Bij 100% heb je een continu puls, bij hele lage waarden heb je heel veel pulsen. Een puls is aan - uit. In een elektrische loop is een magnetisch veld aanwezig. Hierin zit energie opgeslagen. Wanneer de loop wordt verbroken (door schakelen bij PWM signaal) zorgt de energie uit het magnetisch veld voor een stroom die doorloopt en langzaam wegebt. Bij de open verbinding zal er dan een vonk overspringen. Dit is ongewenst zodat men een kortsluitcircuit met diode toepast waarover de stroom kan doorlopen en in een kring kan ronddraaien (freewheelen). Het nadeel van een diode is de spanningsval. Hierdoor ontstaat warmte, bij veel schakelingen (dus in het lage bereik van de regelaar) heel veel warmte.
Active Freewheeling werkt op dezelfde manier, echter de diode in het kortsluitcircuit is vervangen door een actief schakelende mosfet. Dus stroomkring onderbreken voor schakelen = opensturen kortsluit mosfet voor wegebben stroom. Een mosfet heeft nauwelijks een spanningsdrop waardoor er veel minder warmte ontstaat. Schijnt echt een fors verschil te zijn.
Dus het verhaal van een koele regelaar bij lage waarden kan zeker kloppen. Toch lijkt het me nog geen optimale situatie maar kan dit nog niet echt onderbouwen")
De regelaar stuurt de motor aan met pulsen (PWM), hiermee krijg je een gemiddelde spanning op de motor. Bij 100% heb je een continu puls, bij hele lage waarden heb je heel veel pulsen. Een puls is aan - uit. In een elektrische loop is een magnetisch veld aanwezig. Hierin zit energie opgeslagen. Wanneer de loop wordt verbroken (door schakelen bij PWM signaal) zorgt de energie uit het magnetisch veld voor een stroom die doorloopt en langzaam wegebt. Bij de open verbinding zal er dan een vonk overspringen. Dit is ongewenst zodat men een kortsluitcircuit met diode toepast waarover de stroom kan doorlopen en in een kring kan ronddraaien (freewheelen). Het nadeel van een diode is de spanningsval. Hierdoor ontstaat warmte, bij veel schakelingen (dus in het lage bereik van de regelaar) heel veel warmte.
Active Freewheeling werkt op dezelfde manier, echter de diode in het kortsluitcircuit is vervangen door een actief schakelende mosfet. Dus stroomkring onderbreken voor schakelen = opensturen kortsluit mosfet voor wegebben stroom. Een mosfet heeft nauwelijks een spanningsdrop waardoor er veel minder warmte ontstaat. Schijnt echt een fors verschil te zijn.
Dus het verhaal van een koele regelaar bij lage waarden kan zeker kloppen. Toch lijkt het me nog geen optimale situatie maar kan dit nog niet echt onderbouwen
Intussen zijn we een beetje offtopic volgens mij, maar als je wil dat ik met je meedenk/reken stuur maar een PM dan.[
Groeten, Marco.
QUOTE=jdejager;3537325]Dat klopt. Had SSM een aantal dagen geleden een mail gestuurd maar tot op heden geen reactie. Nu heb ik hem wel in het engels gestuurd (wegens mijn slechte kennis van het Duits) maar neem aan dat dit geen probleem moet zijn.
Moet eerlijk zeggen dat ik niet heel erg gecharmeerd ben van de elektro ombouwset van SSM. Denk dat die jaren geleden is ontworpen toen alleen Hacker goede grote motoren had. Ga het mechaniek ook niet slopen. Alleen tussenplaten vervangen voor nieuw gefreesde versies zodat ik met een tandriem kan werken. Eigenlijk op de manier zoals de brandstofmotor er ook in heeft gehangen, maar dan daar een tandriemoverbrenging ipv een pinion.[/QUOTE]
Groeten, Marco.
QUOTE=jdejager;3537325]Dat klopt. Had SSM een aantal dagen geleden een mail gestuurd maar tot op heden geen reactie. Nu heb ik hem wel in het engels gestuurd (wegens mijn slechte kennis van het Duits) maar neem aan dat dit geen probleem moet zijn.
Moet eerlijk zeggen dat ik niet heel erg gecharmeerd ben van de elektro ombouwset van SSM. Denk dat die jaren geleden is ontworpen toen alleen Hacker goede grote motoren had. Ga het mechaniek ook niet slopen. Alleen tussenplaten vervangen voor nieuw gefreesde versies zodat ik met een tandriem kan werken. Eigenlijk op de manier zoals de brandstofmotor er ook in heeft gehangen, maar dan daar een tandriemoverbrenging ipv een pinion.[/QUOTE]
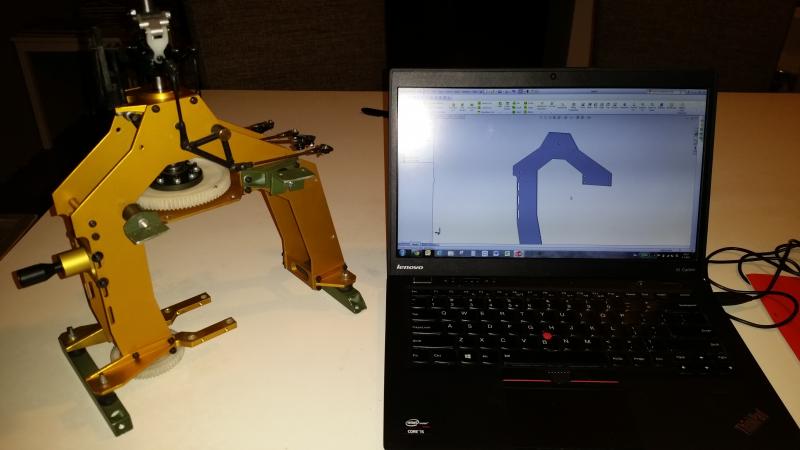
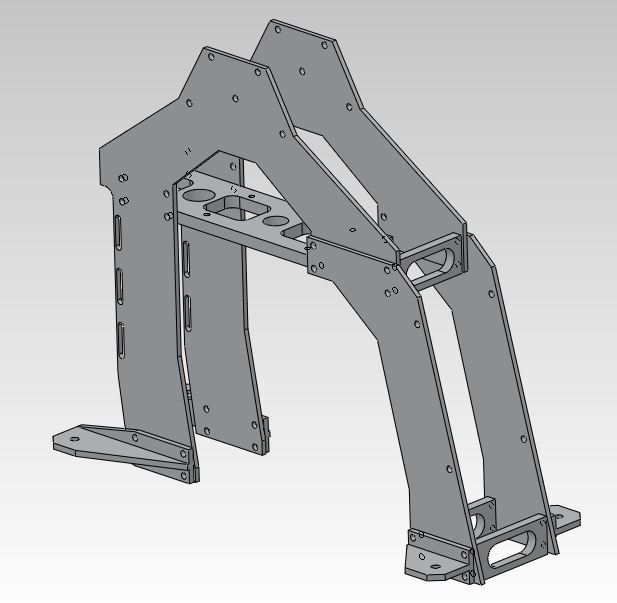
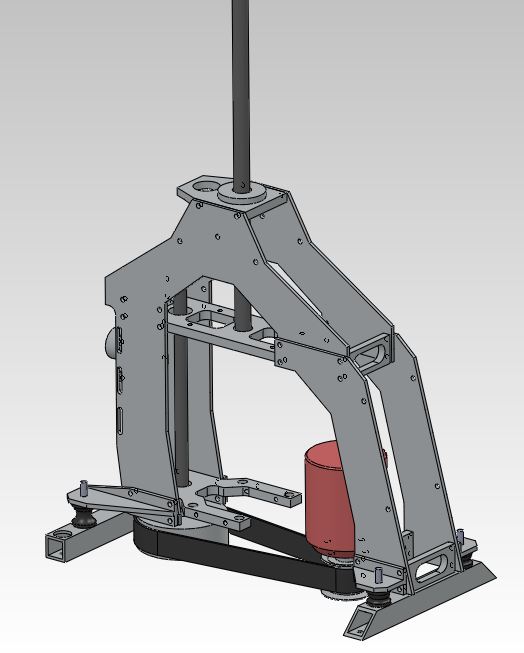
We dwalen inderdaad af. Ik heb vanavond maar eens een begin gemaakt het mechaniek in Solid Works te zetten. Gaat niet echt snel omdat ik het mechaniek liever niet wil demonteren. Alles zit netjes vast met Loctite dus ik probeer zoveel mogelijk onderdelen in gemonteerde stand te meten.
Het mechaniek bestaat uit 4 zijplaten van 2,5mm dik. De twee voorste en twee achterste zijn identiek aan elkaar. Hiertussen zijn dwarsplaten opgenomen die de boel aan elkaar verbinden, zorgen voor de juiste tussenafstand en waarin de assen worden gelagerd. Het is best een mooie constructie, en het draait geweldig mooi licht.
Doel is om de Kontronik Pyro700 op z'n kop zo ver mogelijk naar voren te monteren. Het tandwiel op de tussenas eraf en daartussen een riemverbinding. Vervolgens nog accudragers aan weerszijden van het frame.
Het mechaniek bestaat uit 4 zijplaten van 2,5mm dik. De twee voorste en twee achterste zijn identiek aan elkaar. Hiertussen zijn dwarsplaten opgenomen die de boel aan elkaar verbinden, zorgen voor de juiste tussenafstand en waarin de assen worden gelagerd. Het is best een mooie constructie, en het draait geweldig mooi licht.
Doel is om de Kontronik Pyro700 op z'n kop zo ver mogelijk naar voren te monteren. Het tandwiel op de tussenas eraf en daartussen een riemverbinding. Vervolgens nog accudragers aan weerszijden van het frame.
Laatst bewerkt door een moderator:
Waarom hou je de motor niet zo kort mogelijk op het tandwiel? Dan heb je het voorste gedeelte van je interieur ook nog vrij, zodat je "door de heli heen" kan kijken als de schuifdeuren openstaan. De balans maak je wel weer in orde door de accu's strategisch te plaatsen.
Dan heb je ook geen lange motorplaat nodig, wat weer steviger monteert.
Dit is mijn Vario Benzin Acrobatic, in hoogte aangepast voor mijn Apache. Ik heb de 5:1 staartoverbrenging en 40:20 op de motor zodat ik op 1:10 totaal uitkom. Voor jou zou die anders worden natuurlijk. Hier heb ik de standaard Vario riem gebruikt.
Groeten, Marco.
Dan heb je ook geen lange motorplaat nodig, wat weer steviger monteert.
Dit is mijn Vario Benzin Acrobatic, in hoogte aangepast voor mijn Apache. Ik heb de 5:1 staartoverbrenging en 40:20 op de motor zodat ik op 1:10 totaal uitkom. Voor jou zou die anders worden natuurlijk. Hier heb ik de standaard Vario riem gebruikt.


Groeten, Marco.
Hallo Marco,
Ik denk dat het achterste deel van de heli sowieso niet zo goed doorkijkbaar is. Je ziet daar toch je mechaniek delen en ook de accu's. De cockpit moet uiteraard wel vrij blijven maar dat gaat wel lukken. Wil binnenkort eens wat dingen tijdelijk monteren om zo een beeld te krijgen bij het zwaartepunt. Dan kan ik dit mooi meenemen in de positie van de motor.
Ik zie wel dat jouw mechaniek veel langer is. Wanneer ik de motor helemaal voorin heb dan is mijn tandriem niet zo lang als hij in jouw mechaniek was geweest.
Ik denk dat het achterste deel van de heli sowieso niet zo goed doorkijkbaar is. Je ziet daar toch je mechaniek delen en ook de accu's. De cockpit moet uiteraard wel vrij blijven maar dat gaat wel lukken. Wil binnenkort eens wat dingen tijdelijk monteren om zo een beeld te krijgen bij het zwaartepunt. Dan kan ik dit mooi meenemen in de positie van de motor.
Ik zie wel dat jouw mechaniek veel langer is. Wanneer ik de motor helemaal voorin heb dan is mijn tandriem niet zo lang als hij in jouw mechaniek was geweest.
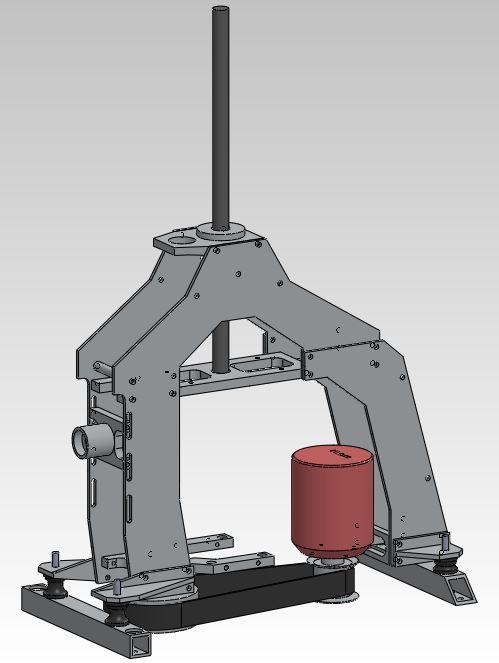
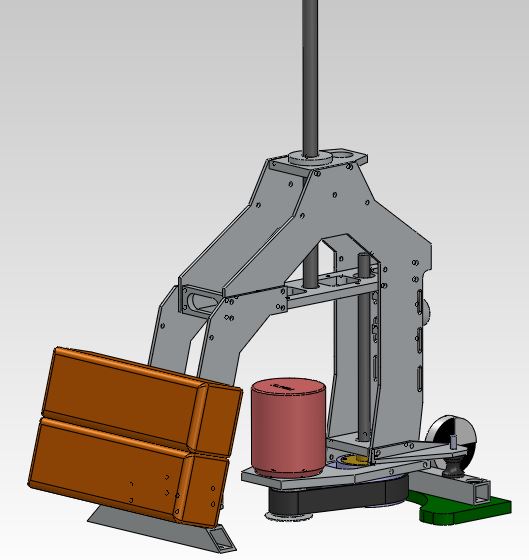
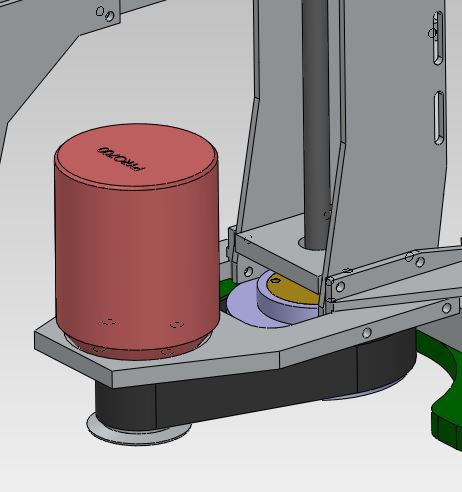
Heb nu de belangrijkste onderdelen van het mechaniek erin staan. Ben nu bezig met het inpassen van de overbrenging en motor. Wil graag de Kontronik Pyro700 motor gaan aanschaffen. Deze is te koop met een KV getal van 340/450/520/560. Maximaal continu vermogen van respectievelijk 2,5/2,5/3/3,5kW. Qua prijs en gewicht zijn de motoren gelijk. In een ander draadje is al het een en ander besproken over verschillen tussen elektromotoren. Op dit moment heb ik de volgende overbrenging erin:
Motor tandriemschijf: stc 23,87mm
Secundaire as tandriemschijf: stc 57,3mm
Pinion bovenaan secundaire as: 15 tands (bestaand mechaniek)
Maingear: 85 tands (bestaand mechaniek)
Totale overbrenging is dus 1:13,6
Heb nu de 560 kv motor erin op 10s. Bij 80% regelaar signaal draait de motor dus 0,8*(10*3,5V)*560 = 15680 rpm. Het rotortoerental komt dan uit op ongeveer 1150 rpm
Heb hierbij een aantal vragen:
1: Is deze motor/overbrenging combi een goede keuze of kan ik beter een lagere KV waarde nemen en een kleinere overbrenging?
2: Welk rotortoerental aanhouden voor de SSM 1/7 mechaniek (180cm rotordiameter)
3: Motor berekenen op 80% regelaar signaal of andere waarde?
4: Keuze accu, nu 2x5S of beter 2x6S.
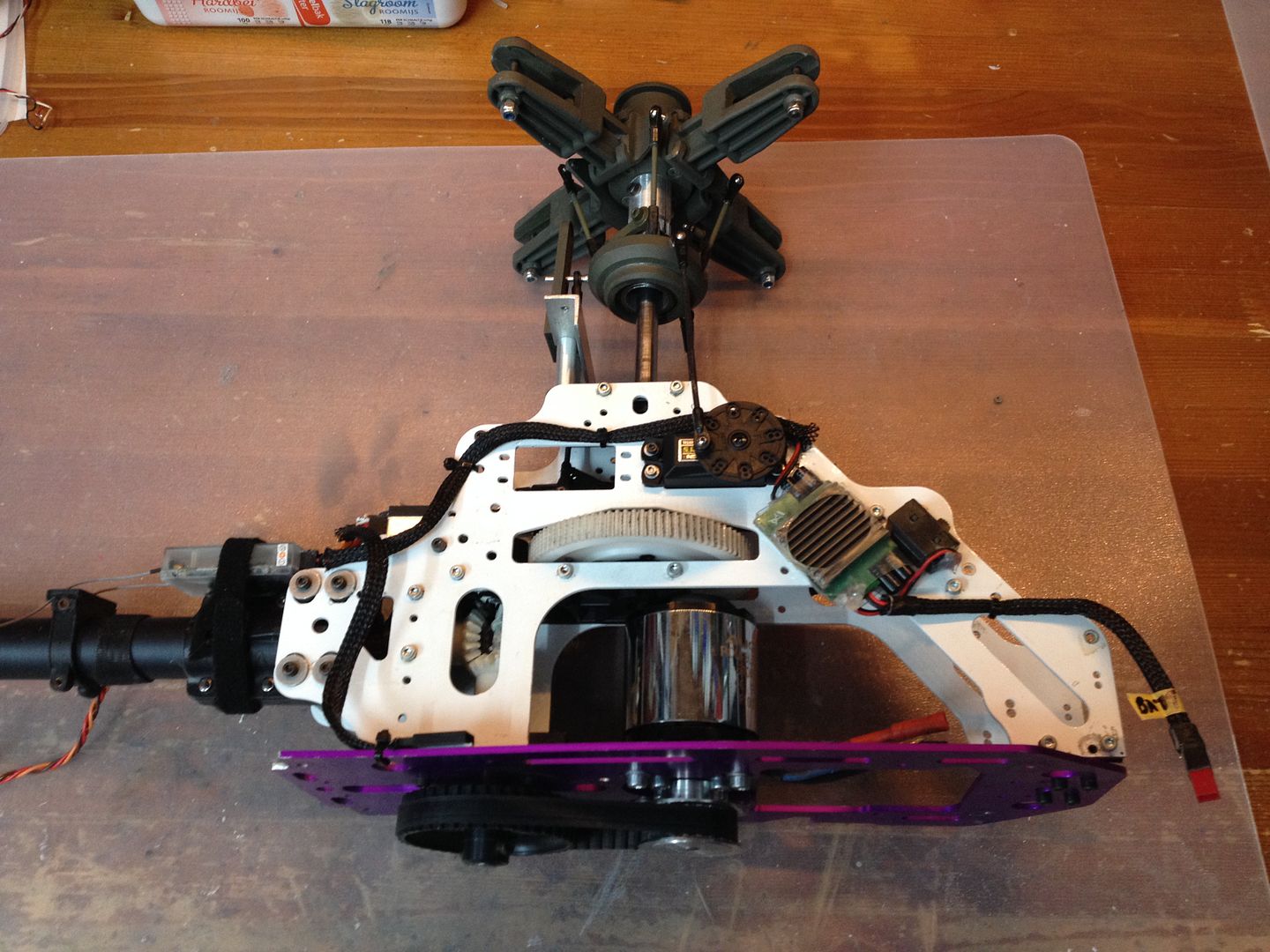
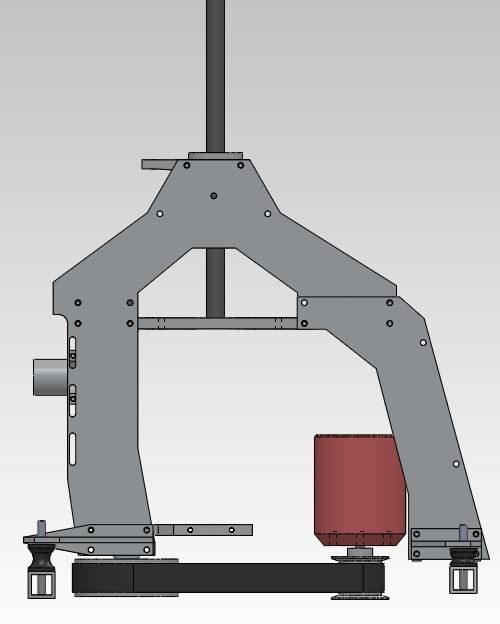
Hieronder nog een paar plaatjes om een beeld te krijgen. De plek van de motor is nog niet definitief. De boel moet ook nog omhoog omdat ik anders over de bodem van de heli schraap met de tandriemschijven
Motor tandriemschijf: stc 23,87mm
Secundaire as tandriemschijf: stc 57,3mm
Pinion bovenaan secundaire as: 15 tands (bestaand mechaniek)
Maingear: 85 tands (bestaand mechaniek)
Totale overbrenging is dus 1:13,6
Heb nu de 560 kv motor erin op 10s. Bij 80% regelaar signaal draait de motor dus 0,8*(10*3,5V)*560 = 15680 rpm. Het rotortoerental komt dan uit op ongeveer 1150 rpm
Heb hierbij een aantal vragen:
1: Is deze motor/overbrenging combi een goede keuze of kan ik beter een lagere KV waarde nemen en een kleinere overbrenging?
2: Welk rotortoerental aanhouden voor de SSM 1/7 mechaniek (180cm rotordiameter)
3: Motor berekenen op 80% regelaar signaal of andere waarde?
4: Keuze accu, nu 2x5S of beter 2x6S.
Hieronder nog een paar plaatjes om een beeld te krijgen. De plek van de motor is nog niet definitief. De boel moet ook nog omhoog omdat ik anders over de bodem van de heli schraap met de tandriemschijven
Laatst bewerkt door een moderator:
Je berekening klopt helemaal, 3,5V cellspanning onder belasting is de juiste waarde om mee te rekenen. Ook 80% regelaaropening is perfect. Je motorkeuze zou ik hetzelfde doen. Eventueel kun je een lagere kV nemen omdat je daarmee een groter motortandwiel kunt monteren en er daarmee meer tandjes ingrijpen. Ik ga zelf nooit kleiner als 15T bij een XL pattern, beetje afhankelijk van de hoek waarin de belt loopt uiteraard.
Mijn eigen elektro Vario Bell47G met 1,8M draait ook 1150rpm en vliegt daarmee prima. Echter hij weegt maar 7kg all in, denk dat die van jou iets zwaarder wordt ik maar zou toch het koptoerental zo laten. Ik moet er wel bij zeggen dat ik niet weet wat de SSM kop mag hebben dus verwacht ik dat je dat zelf gecheckt hebt.
Ik heb zelf met 10S en 12S gevlogen en ben weer standaard terug op 10S. De stromen zijn zodanig laag dat je er geen echt voordeel mee hebt op 12S te vliegen, of het moet zo zijn dat je al een heleboel 6S packs hebt natuurlijk.
Ben er jaloers op dat je zo mooi kunt tekenen! Dat moet ik ook nog eens leren.
Groeten, Marco.
Mijn eigen elektro Vario Bell47G met 1,8M draait ook 1150rpm en vliegt daarmee prima. Echter hij weegt maar 7kg all in, denk dat die van jou iets zwaarder wordt ik maar zou toch het koptoerental zo laten. Ik moet er wel bij zeggen dat ik niet weet wat de SSM kop mag hebben dus verwacht ik dat je dat zelf gecheckt hebt.
Ik heb zelf met 10S en 12S gevlogen en ben weer standaard terug op 10S. De stromen zijn zodanig laag dat je er geen echt voordeel mee hebt op 12S te vliegen, of het moet zo zijn dat je al een heleboel 6S packs hebt natuurlijk.
Ben er jaloers op dat je zo mooi kunt tekenen! Dat moet ik ook nog eens leren.
Groeten, Marco.
Hallo Marco,
Heb de Huey schaalkop van Vario erbij. Qua toegestane toerentallen zal ik uiteraard eerst alles nog even nalopen. Heb zelf ook een voorkeur voor de motor met de hoogste KV waarde. Heeft ook het hoogste maximaal vermogen.
De tandriemschijf bij de motor heb ik ook 15 tands gekozen. Kleiner zit je inderdaad met een vrij beperkt aantal tandjes. Wat is de hoogte van jouw riem?
Voor het bepalen van de motorpositie wil ik ook eerst de accu's erin tekenen. Door het toekennen van het juiste soortelijk gewicht (of totaalgewicht) kan ik het zwaartepunt van het mechaniek zien in het CAD pakket. Dan kan ik op de heli al wat spelen met gewichten om zo goed mogelijk uit te komen.
Heb zelf een aantal 6S accupacks maar niet allemaal dezelfde grootte. Ga dan ook liever voor de 10S.
Het tekenen doe ik met Solid Works. Een geweldig pakket voor het designen van dit soort dingen. Ook de werktekeningen maak ik vanuit dit pakket. Voordeel is dat je zeker weet dat de passing goed is.
Heb de Huey schaalkop van Vario erbij. Qua toegestane toerentallen zal ik uiteraard eerst alles nog even nalopen. Heb zelf ook een voorkeur voor de motor met de hoogste KV waarde. Heeft ook het hoogste maximaal vermogen.
De tandriemschijf bij de motor heb ik ook 15 tands gekozen. Kleiner zit je inderdaad met een vrij beperkt aantal tandjes. Wat is de hoogte van jouw riem?
Voor het bepalen van de motorpositie wil ik ook eerst de accu's erin tekenen. Door het toekennen van het juiste soortelijk gewicht (of totaalgewicht) kan ik het zwaartepunt van het mechaniek zien in het CAD pakket. Dan kan ik op de heli al wat spelen met gewichten om zo goed mogelijk uit te komen.
Heb zelf een aantal 6S accupacks maar niet allemaal dezelfde grootte. Ga dan ook liever voor de 10S.
Het tekenen doe ik met Solid Works. Een geweldig pakket voor het designen van dit soort dingen. Ook de werktekeningen maak ik vanuit dit pakket. Voordeel is dat je zeker weet dat de passing goed is.
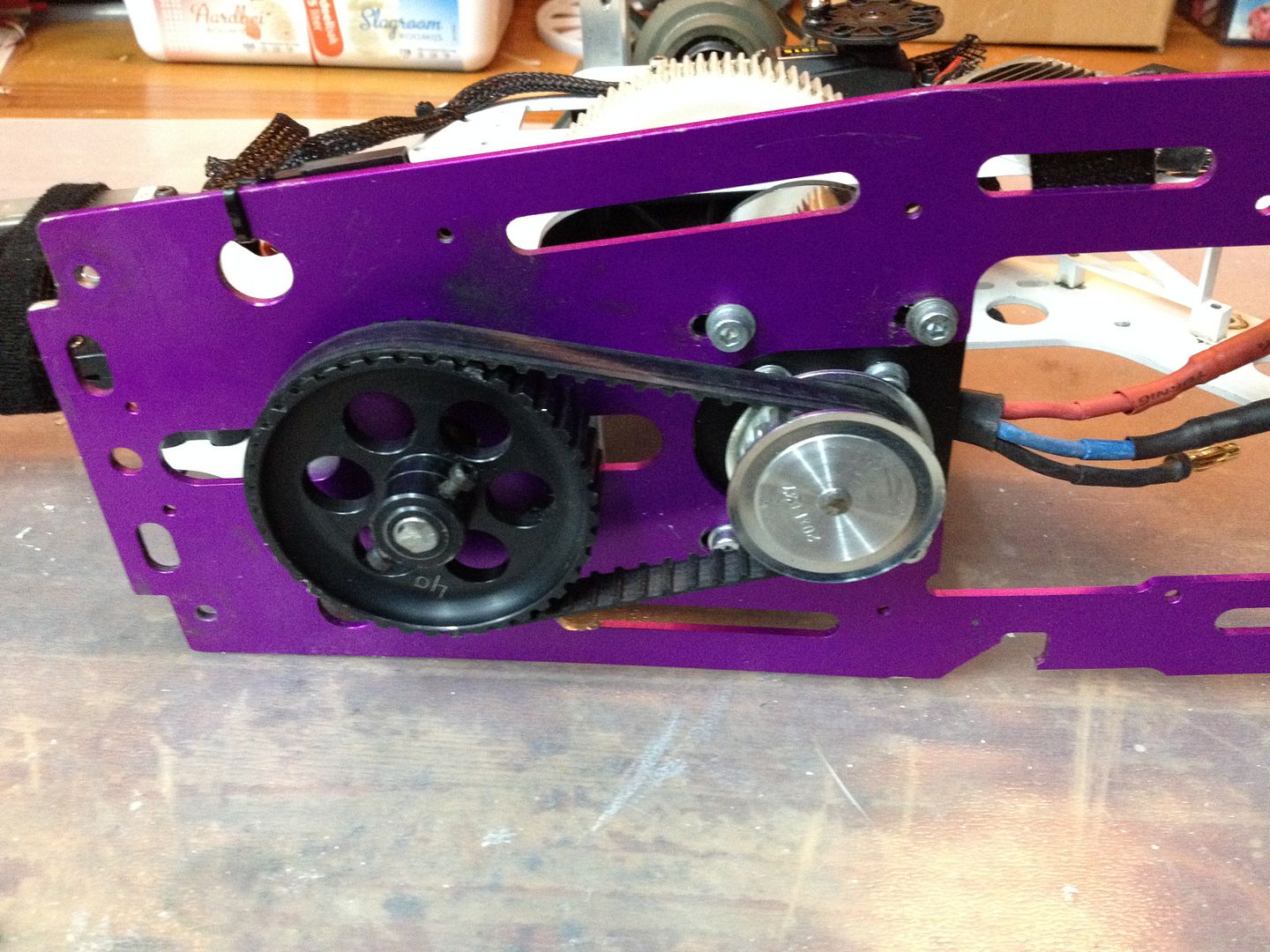
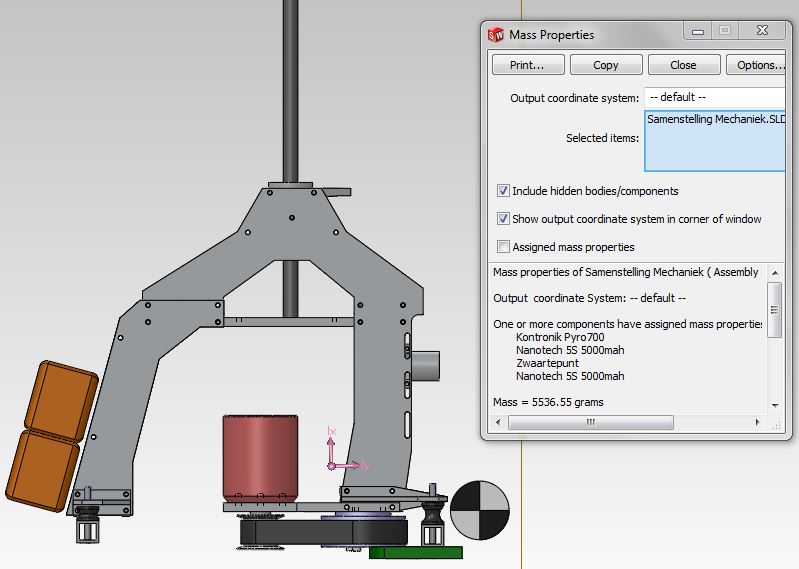
Ben weer een stukje verder. De motor zit nu vastgeknoopt aan het frame. Heb één nieuw deel hiervoor nodig. De riemlengte wordt 280mm. Dan kan ik namelijk een standaard gewikkelde riem nemen. Die heeft een nog veel hogere breukgrens dan de gelaste versie. Is met staal verstevigd. H.o.h. van de poelies wordt dan 74,37mm.
Heb daarnaast even de accu's erin gezet samen met het geschat gewicht van de nu nog lege helicopter als "zwaartepunt" erin getekend. Het totale zwaartepunt ligt nu een kleine 3 cm achter de rotoras. De accu's kunnen ook niet meer naar voren. Maar dit gaan we wel oplossen. Wil nog wel een houder maken die ik ook op het frame vastschroef en waar de accu's op komen te liggen.
Als laatste ga ik nog naar de manier van monteren van de servo's kijken. Daarvoor heb ik nu een houten "bakje" maar ik moet even goed kijken of dit wel aan het frame wordt gemonteerd. Mijn eerste indruk was dat dit vast wordt gemaakt aan de romp zelf. Door de rubbers in het mechaniek zouden er dan ongewenste stuurbewegingen kunnen ontstaan omdat de servo's dan niet met het mechaniek zijn verbonden. Mocht dit het geval zijn dan maak ik ook direct een aluminium servohouder. Maar moet dit nog even goed bekijken.
De poelie steekt onder het mechaniek uit, daarom heb ik een klein stukje van het frame in de heli getekend. Gelukkig zit hier een hele mooie uitsparing in waar de koeltunnel zat. Hier past de poelie weer perfect in. Geen gezeur dus met slijpen etc.
Heb daarnaast even de accu's erin gezet samen met het geschat gewicht van de nu nog lege helicopter als "zwaartepunt" erin getekend. Het totale zwaartepunt ligt nu een kleine 3 cm achter de rotoras. De accu's kunnen ook niet meer naar voren. Maar dit gaan we wel oplossen. Wil nog wel een houder maken die ik ook op het frame vastschroef en waar de accu's op komen te liggen.
Als laatste ga ik nog naar de manier van monteren van de servo's kijken. Daarvoor heb ik nu een houten "bakje" maar ik moet even goed kijken of dit wel aan het frame wordt gemonteerd. Mijn eerste indruk was dat dit vast wordt gemaakt aan de romp zelf. Door de rubbers in het mechaniek zouden er dan ongewenste stuurbewegingen kunnen ontstaan omdat de servo's dan niet met het mechaniek zijn verbonden. Mocht dit het geval zijn dan maak ik ook direct een aluminium servohouder. Maar moet dit nog even goed bekijken.
De poelie steekt onder het mechaniek uit, daarom heb ik een klein stukje van het frame in de heli getekend. Gelukkig zit hier een hele mooie uitsparing in waar de koeltunnel zat. Hier past de poelie weer perfect in. Geen gezeur dus met slijpen etc.
Laatst bewerkt door een moderator:
Qua zwaartepunt: je kunt niet alleen gewicht toevoegen aan de voorkant, je kunt, en nog VEEL effectiever ook, OOK gewicht besparen op de staart....
Simpelweg bijvoorbeeld van een aluminium hekrotorhuis overstappen naar een kunststof hekrotorhuis scheelt je al zomaar een halve tot een cm zwaartepuntsafstand. voor electroaandrijving is het kunsttstof hekrotormechaniekje van Vario voldoende (het hodt het al 10 jaar uit op mijn benzine-cobra). Glasvezel onderdelen zoals de horizontale stabs vervangen voor balsa, win je ook een hoop mee. Onnodige lijm verwijderen, overbodige randen glasvezel, stalen pushrods voor de hekrotor vervangen voor carbon staf, hekrotor servo zo ver mogelijk naar voren, De langst mogelijke standaard maat riem, wellicht kan je motor nog een flink stuk naar voren, het scheelt allemaal merkbaar.
Zoveel dat het alleen al in mijn 450 size BO 105 ruim 100 gram lood overbodig maakte.
Groet, Bert
Simpelweg bijvoorbeeld van een aluminium hekrotorhuis overstappen naar een kunststof hekrotorhuis scheelt je al zomaar een halve tot een cm zwaartepuntsafstand. voor electroaandrijving is het kunsttstof hekrotormechaniekje van Vario voldoende (het hodt het al 10 jaar uit op mijn benzine-cobra). Glasvezel onderdelen zoals de horizontale stabs vervangen voor balsa, win je ook een hoop mee. Onnodige lijm verwijderen, overbodige randen glasvezel, stalen pushrods voor de hekrotor vervangen voor carbon staf, hekrotor servo zo ver mogelijk naar voren, De langst mogelijke standaard maat riem, wellicht kan je motor nog een flink stuk naar voren, het scheelt allemaal merkbaar.
Zoveel dat het alleen al in mijn 450 size BO 105 ruim 100 gram lood overbodig maakte.
Groet, Bert
Hallo Bert,
Dat klopt inderdaad. De staart is een lange hefboom. Maar ik wil de aandrijving niet aanpassen. Het is nu een heel degelijk geheel. Dan accepteer ik straks liever wat extra gewicht in de cockpit. Uiteindelijk moet er toch een schaal cockpit in die ook wat gewicht voor zijn rekening neemt. Daarnaast nog een lipo voor de besturing. De motor wil ik niet meer naar voren houden. Anders belemmert hij helemaal de doorkijk. Daarnaast kan ik met deze maat een mooie standaard tandriem gebruiken.
Ga sowiezo wel lichter uitkomen dan met de brandstofmotor.
Maar zal inderdaad nog wel even kritisch alles doornemen om te kijken of er nog onnodig gewicht is toegevoegd.
Groet,
Johannes
Dat klopt inderdaad. De staart is een lange hefboom. Maar ik wil de aandrijving niet aanpassen. Het is nu een heel degelijk geheel. Dan accepteer ik straks liever wat extra gewicht in de cockpit. Uiteindelijk moet er toch een schaal cockpit in die ook wat gewicht voor zijn rekening neemt. Daarnaast nog een lipo voor de besturing. De motor wil ik niet meer naar voren houden. Anders belemmert hij helemaal de doorkijk. Daarnaast kan ik met deze maat een mooie standaard tandriem gebruiken.
Ga sowiezo wel lichter uitkomen dan met de brandstofmotor.
Maar zal inderdaad nog wel even kritisch alles doornemen om te kijken of er nog onnodig gewicht is toegevoegd.
Groet,
Johannes
Ziet er goed uit! De belthoogte is 10mm bij mij.
Het waren slechts suggesties, maar het is mij indertijd opgevallen hoeveel gewicht (ballast bedoel ik) je kunt besparen met een beetje zorgvudigheid.
Groet, Bert
Dat geloof ik graag. Zeker bij deze B versie van de Huey is de romp relatief kort en de staart lang. We gaan het zien.