Hoi Michel,
Hahaha... uhm, het zou inderdaad werken")
Wel een grappig idee en waarschijnlijk ook nog uniek !
@ Allemaal,
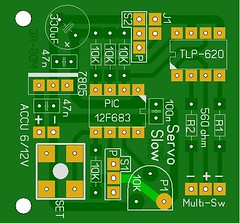
Vandaag een Servo-Slow gesoldeerd, die je middels de zender kunt bedienen.

Met deze print zijn er meerdere opstellingen mogelijk.
Het kan dienen als een normale ServoSlow effect, waar de servo de stick-positie langzaam opvolgt...
Of,
Er zijn maximaal 2 servo's onafhankelijk te bedienen van positie A naar B.
Beide posities zijn op te slaan, tijdens de setup.
Deze laatste functie moet ik nog schrijven/programmeren !
Een enkele servo is uiteraard al mogelijk.
Hahaha... uhm, het zou inderdaad werken
Wel een grappig idee en waarschijnlijk ook nog uniek !
@ Allemaal,
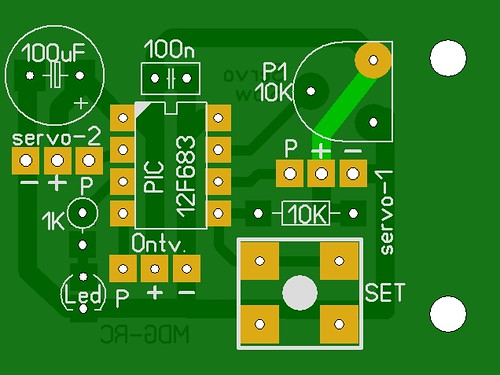
Vandaag een Servo-Slow gesoldeerd, die je middels de zender kunt bedienen.
Met deze print zijn er meerdere opstellingen mogelijk.
Het kan dienen als een normale ServoSlow effect, waar de servo de stick-positie langzaam opvolgt...
Of,
Er zijn maximaal 2 servo's onafhankelijk te bedienen van positie A naar B.
Beide posities zijn op te slaan, tijdens de setup.
Deze laatste functie moet ik nog schrijven/programmeren !
Een enkele servo is uiteraard al mogelijk.
")