Gemengde gevoelens over de laatste test van gisteren.
Was best koud maar tussen de winderige dagen door was dit een rustig moment.
Nog steeds 5°C omgevingstemperatuur. Watertemperatuur iets daarboven.
Het waterpeil van mijn testvijver is lager dan normaal. Dit betekent dat het water de eerste paar meter 5 cm diep is. Duidelijk zichtbaar op deze foto van mijn oude GoPro
 Gelukkig pakte ik mijn 30 jaar oude legerkisten, die nog steeds waterdicht zijn!
Gelukkig pakte ik mijn 30 jaar oude legerkisten, die nog steeds waterdicht zijn! ")
Ik heb een wijziging aangebracht t.o.v. de laatste testrun.
Links zie je de eerder gebruikte stator-schoepenring (A):

Waarom geen volledige video met telemetrie?
Pech. Ik verwisselde een andere geheugenkaart in mijn oude GoPro. Ik heb 3 gelijke merk-, maat- en snelheidskaarten. Deze gaf SD ERR ... dus geen opname ben ik bang
Ik heb een korte film opgenomen met mijn mobiel. Toen kwam ik erachter dat ik vergeten was een plug er in te doen, dus er kwam water in de romp. Aangezien het gat boven de waterlijn ligt, kwam er gelukkig bijna niets binnen.
Ook goed zichtbaar in bovenstaande video, de LVC van de Swordfish 220A plus kwam er de hele tijd in. Dit is fout, aangezien ik volledige telemetrie gebruik waardoor ik zelfs de spanning van elke cel afzonderlijk in realtime kan zien!
Deze Esc is dus onbruikbaar geworden. Ik heb een 160A reserve Esc watergekoeld nog liggen. Helaas is deze twee keer zo groot, wat net niet in de romp past
Zelfs met de huidige Esc is het aansluiten van de batterij al een heel gedoe. En door de duw en trek handelingen die ik moet uitvoeren kan er een sensorkabel losraken. Ik heb bijvoorbeeld voor 80% van de run geen ampèremeting. Gelukkig werkte RPM dus ik kan het berekenen, maar toch is het vervelend
Ik kon volledige rakken varen (deze keer vertelde mijn telemetrie me hoe ver het model van me verwijderd was, meer dan 120 meter op een bepaald punt) om de rechtuitstabiliteit te zien.
Zodra ik de verticale trim in neutraal zette (0° of horizontaal) ging de Recoil overal heen, behalve in een rechte lijn. Onvoorspelbare besturing ook.
Zodra ik de verticale trim op 2° omhoog zette, was een "roosterrail" zichtbaar, en ze liep in een perfecte rechte lijn. Het sturen was voorspelbaar en zelfs scherp ook! Zie het filmpje.
Alles boven de 2° maakte dat ze ging hoppen (porpoising) en langzamer ging omdat de boeg te ver omhoog komt.
Alles met een negatieve hoek zorgde ervoor dat ze de aanzuiging verloor vanaf 2/3 gasstand.
Kortom, dit zou wel eens het einde kunnen zijn van de Recoil met deze pomp. Dat is jammer, want ik wil dat de vraag beantwoord wordt: waarom slechte priming in vergelijking met de vorige gebruikte statorring?
Zijn het de gebogen bladen of de hoek?
Makkelijke manier om erachter te komen: ik moet een LE 30° - TE 10° printen met rechte bladen. Zoals de Amerikaanse modelbouwer met wie ik deze jet ontwikkeld heb zei: nooit twee parameters tegelijk veranderen...

Vanwege de weerstand van de stuurnozzle zou ik graag een run willen doen met de rideplate die ik eerder gebruikte...
Was best koud maar tussen de winderige dagen door was dit een rustig moment.
Nog steeds 5°C omgevingstemperatuur. Watertemperatuur iets daarboven.
Het waterpeil van mijn testvijver is lager dan normaal. Dit betekent dat het water de eerste paar meter 5 cm diep is. Duidelijk zichtbaar op deze foto van mijn oude GoPro
Ik heb een wijziging aangebracht t.o.v. de laatste testrun.
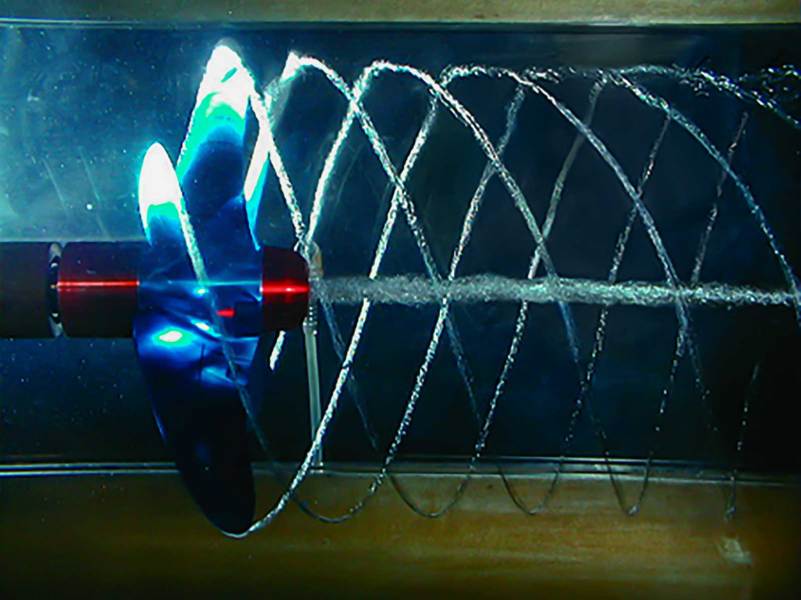
Links zie je de eerder gebruikte stator-schoepenring (A):
- LINKS: 7 bladen recht, Naca vleugelprofiel doorsnede gebogen. LE hoek 20° naar TE hoek 0°
- RECHTS: 7 bladen gebogen, doorsnede Naca vleugelprofiel gebogen. LE hoek 30° naar TE hoek 10°
- topsnelheid 42,7 km/u. een te klein verschil om te zeggen dat deze langzamer is dan de vorige statorring
- Max. ampère: 90A, geen verschil
- RPM: geen verschil, max 16500
- het klinkt anders (vergelijk bovenstaande video van vorige run met deze. Let wel, er vlogen drones op de achtergrond)
- het "reprimen" (de eigenschap om water aan te zuigen bij draaiende impeller, als eerder lucht is ingezogen) heel veel slechter, significant! Zie filmpje hieronder!
- De waterstraal zag er meer recht uit, zelfs een "rooster-tail" is zichtbaar op de video met een verticale trimhoek van 2° omhoog
- duidelijk zichtbaar: het uiteinde van de verticaal trimbare nozzle sleept met alle snelheden door het water. Dit zorgt zeker voor extra weerstand. Geen verschil met vorige run, maar beter zichtbaar waarschijnlijk omdat de waterstraal meer recht was dan uitwaaierend zoals bij de linker statorring het geval was.
Waarom geen volledige video met telemetrie?
Pech. Ik verwisselde een andere geheugenkaart in mijn oude GoPro. Ik heb 3 gelijke merk-, maat- en snelheidskaarten. Deze gaf SD ERR ... dus geen opname ben ik bang
Ik heb een korte film opgenomen met mijn mobiel. Toen kwam ik erachter dat ik vergeten was een plug er in te doen, dus er kwam water in de romp. Aangezien het gat boven de waterlijn ligt, kwam er gelukkig bijna niets binnen.
Ook goed zichtbaar in bovenstaande video, de LVC van de Swordfish 220A plus kwam er de hele tijd in. Dit is fout, aangezien ik volledige telemetrie gebruik waardoor ik zelfs de spanning van elke cel afzonderlijk in realtime kan zien!
Deze Esc is dus onbruikbaar geworden. Ik heb een 160A reserve Esc watergekoeld nog liggen. Helaas is deze twee keer zo groot, wat net niet in de romp past
Zelfs met de huidige Esc is het aansluiten van de batterij al een heel gedoe. En door de duw en trek handelingen die ik moet uitvoeren kan er een sensorkabel losraken. Ik heb bijvoorbeeld voor 80% van de run geen ampèremeting. Gelukkig werkte RPM dus ik kan het berekenen, maar toch is het vervelend
Ik kon volledige rakken varen (deze keer vertelde mijn telemetrie me hoe ver het model van me verwijderd was, meer dan 120 meter op een bepaald punt) om de rechtuitstabiliteit te zien.
Zodra ik de verticale trim in neutraal zette (0° of horizontaal) ging de Recoil overal heen, behalve in een rechte lijn. Onvoorspelbare besturing ook.
Zodra ik de verticale trim op 2° omhoog zette, was een "roosterrail" zichtbaar, en ze liep in een perfecte rechte lijn. Het sturen was voorspelbaar en zelfs scherp ook! Zie het filmpje.
Alles boven de 2° maakte dat ze ging hoppen (porpoising) en langzamer ging omdat de boeg te ver omhoog komt.
Alles met een negatieve hoek zorgde ervoor dat ze de aanzuiging verloor vanaf 2/3 gasstand.
Kortom, dit zou wel eens het einde kunnen zijn van de Recoil met deze pomp. Dat is jammer, want ik wil dat de vraag beantwoord wordt: waarom slechte priming in vergelijking met de vorige gebruikte statorring?
Zijn het de gebogen bladen of de hoek?
Makkelijke manier om erachter te komen: ik moet een LE 30° - TE 10° printen met rechte bladen. Zoals de Amerikaanse modelbouwer met wie ik deze jet ontwikkeld heb zei: nooit twee parameters tegelijk veranderen...
Vanwege de weerstand van de stuurnozzle zou ik graag een run willen doen met de rideplate die ik eerder gebruikte...
 !
!