Dan wordt het een 100 mm tuimelaar. Kan je ook nog iets zeggen over de "" pook"" van 454 mm .
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Mijn Zlin 226 A opnieuw gebouwd.
- Topicstarter Ed Heemskerk
- Startdatum

Van Eric kreeg ik voor in de vakantie wat leesvoer.
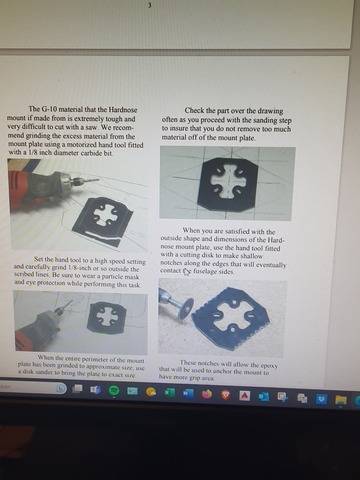
De gebruikelijke achter montage volstaat niet voor een LB stunter, de motor moet aan de neus worden opgehangen in een koolstofplaat welke in de neus is ingebouwd.
Heel herkenbaar bij F3 a is dit al jaren de standaard, misschien LB land ook wel maar ik dacht met een 4 S motor zal het wel zo een vaart niet lopen.
Toch maar een hardnose motormontage voor de Crescendo.

Een uurtje meten en tekenen en zie hier de motordrager voor de Kontronik.
3 mm koolstof met dank aan Bob Hunt.
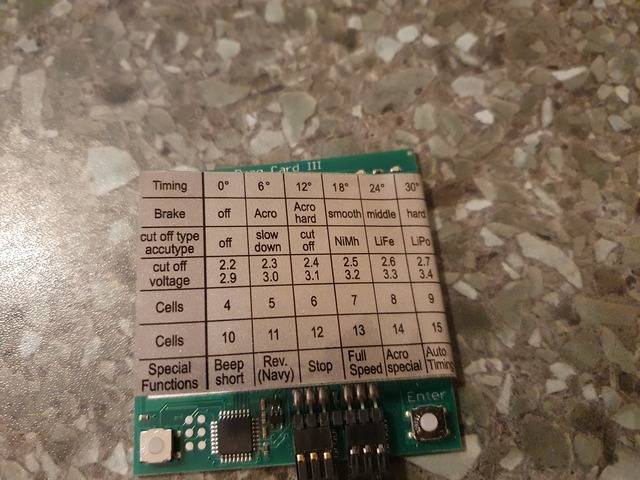
Vandaag de Climb and dive timer timer aangesloten op de YPE 60 regelaar en werkend gekregen.
Weer een geheel nieuwe manier van de data inbrengen.
Volgens het bijgeleverde schema de verbindingen gemaakt met de regelaar en de voeding.
Als eerste moet je een app downloaden ( Bluefruit connect)
Als tweede de Lipo aansluiten aan de regelaar.4 piepjes voor de 4 cellen en een muziekje dat aangeeft dat de regelaar bedrijfsklaar is.
Als derde 5 snelle tikjes tegen het aanzet pennetje
Het lampje wordt nu geel .
Dan verbinding maken met bluetooth via de App.
UART service moet aan staan.
Dan connect .
selecteer connect met UART.
1x op sent en je bent in het instelmenu.
Het nummer in de schrijfbalk intypen van het onderdeel dat je wilt aanpassen.
Voor het opslaan van de wijzigingen moet je 0 intypen.
Dit kan per onderdeel en ook voor de overige aanpassingen die je hebt gedaan.
Het werkt als een toetsenbord van de computer.
In de timer is een beweging sensor die anders werkt dan een governor.
Je kan ook eigen instellingen toevoegen ( open source mogelijkheden)
Binnenkort kan ik de proefopstelling afmaken en kan er veel meer getest worden.
Nu moet ik de motor nog aan de kabels vasthouden.

Weer een geheel nieuwe manier van de data inbrengen.
Volgens het bijgeleverde schema de verbindingen gemaakt met de regelaar en de voeding.
Als eerste moet je een app downloaden ( Bluefruit connect)
Als tweede de Lipo aansluiten aan de regelaar.4 piepjes voor de 4 cellen en een muziekje dat aangeeft dat de regelaar bedrijfsklaar is.
Als derde 5 snelle tikjes tegen het aanzet pennetje
Het lampje wordt nu geel .
Dan verbinding maken met bluetooth via de App.
UART service moet aan staan.
Dan connect .
selecteer connect met UART.
1x op sent en je bent in het instelmenu.
Het nummer in de schrijfbalk intypen van het onderdeel dat je wilt aanpassen.
Voor het opslaan van de wijzigingen moet je 0 intypen.
Dit kan per onderdeel en ook voor de overige aanpassingen die je hebt gedaan.
Het werkt als een toetsenbord van de computer.
In de timer is een beweging sensor die anders werkt dan een governor.
Je kan ook eigen instellingen toevoegen ( open source mogelijkheden)
Binnenkort kan ik de proefopstelling afmaken en kan er veel meer getest worden.
Nu moet ik de motor nog aan de kabels vasthouden.
Laatst bewerkt:
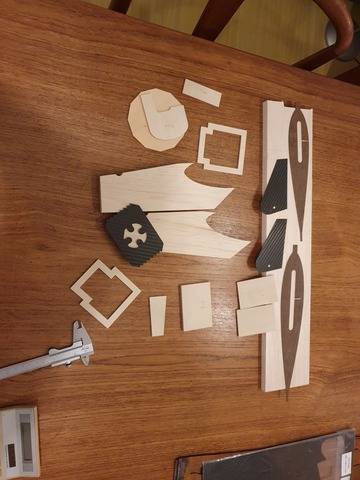
Voorbereiden is het belangrijkste onderdeel van het bouwen.
De Vleugelmallen en de spanten alsmede de koolstof motorplaat is al gereed.
Op de tekening alles nameten en passen.
Ook een inzetplaat voor de proefopstelling is onderweg.

Ben benieuwd naar je ervaringen met de climb and dive timer. Heb je de laatste sotftware update ook?
Hiermee is het mogelijk om de kist bij de 'boven het hoofd' figuren met wat meer vermogen te ondersteunen.
Hiermee is het mogelijk om de kist bij de 'boven het hoofd' figuren met wat meer vermogen te ondersteunen.
Ik heb de meest recente software geïnstalleerd, maar moet nog even wachten totdat de motor plaat voor de proefstandaard gereed is.
De eerste test was te zien of de bluetooth verbinding werkte, en hoe de instellingen gewijzigd kunnen worden.
Ben nog een beetje voorzichtig met de delay wanneer de timer wordt geactiveerd.
Plotseling ging de motor aan terwijl dat niet werd verwacht.
Eerst de motor veilig zonder propeller vast op de proef stand en dan alles uittesten en meten.
Nu heb ik er een YPE regelaar aan gehangen en met de ontvanger de basis instellingen van de motor in de regelaar afgesteld
Timing automatisch
Cells 4
Cut voltage 3.2 volt per cel
Brake Hard
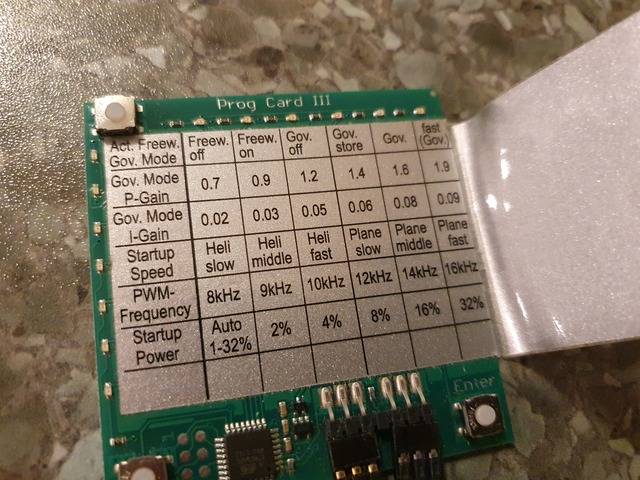
Start up speed plane middle.
PWM frequentie 8kHZ
Start up power auto 1-32 %
De eerste test was te zien of de bluetooth verbinding werkte, en hoe de instellingen gewijzigd kunnen worden.
Ben nog een beetje voorzichtig met de delay wanneer de timer wordt geactiveerd.
Plotseling ging de motor aan terwijl dat niet werd verwacht.
Eerst de motor veilig zonder propeller vast op de proef stand en dan alles uittesten en meten.
Nu heb ik er een YPE regelaar aan gehangen en met de ontvanger de basis instellingen van de motor in de regelaar afgesteld
Timing automatisch
Cells 4
Cut voltage 3.2 volt per cel
Brake Hard
Start up speed plane middle.
PWM frequentie 8kHZ
Start up power auto 1-32 %


De proefopstelling is gereed , moet nog even wachten tot morgen met testen.
Ben benieuwd.
Ah, mooi!
Ik doe niets aan de regelaar, ook niet calibreren, e.e.a. volgens de handleiding. Als de regelaar werkt met de servotester, zou hij ook met de timer moeten werken.
Let er op dat je timer 90 graden gedraaid moet worden, usb naar achteren, pennen naar voren, montage aan linkerkant romp, dat is de standaard instelling. Als je de proefstand rolt om de langsas kun je de torenwisseling controleren.
Voorzichtig met de draaiende propellor.
Ik doe niets aan de regelaar, ook niet calibreren, e.e.a. volgens de handleiding. Als de regelaar werkt met de servotester, zou hij ook met de timer moeten werken.
Let er op dat je timer 90 graden gedraaid moet worden, usb naar achteren, pennen naar voren, montage aan linkerkant romp, dat is de standaard instelling. Als je de proefstand rolt om de langsas kun je de torenwisseling controleren.
Voorzichtig met de draaiende propellor.
toerenwisseling
Je moet toch wel wat aanpassen aan de eigen situatie, bij de eerste 3 regels zie ik een paar instellingen voor vliegtijd, max toerental en delay .
Standaard staan deze op 15 seconden delay 10.000 RPM en de vliegtijd weet ik niet meer.
Deze heb ik aangepast, verder nog niet.
Ik test altijd zonder propeller maar misschien moet het voor de toerental toename met het rollen wel een propeller bevestigen.
Bedankt voor de tips zover.
Standaard staan deze op 15 seconden delay 10.000 RPM en de vliegtijd weet ik niet meer.
Deze heb ik aangepast, verder nog niet.
Ik test altijd zonder propeller maar misschien moet het voor de toerental toename met het rollen wel een propeller bevestigen.
Bedankt voor de tips zover.

De laatste onderdelen van de Crescendo zijn gemaakt.
Een tuimelaar van 100 mm met messing lagering in koolstof gelijmd compleet met aluminium draagplaat.
De motor drager naar ontwerp van Bob Hunt, de wiel kappen van 1 mm koolstofplaten de tip lead outs naar voorbeeld van Henk de Jong.
Alle lossen onderdelen zijn nu af, binnenkort de vleugels snijden en PS spanten in het schuim snijden.
Een geheel ingedekte vleugel met 1.5 mm balsa of de spanten bekleden met Capstrips en alleen de voor en achter lijsten lamineren.
Ik heb nog niet eerder een "open '' vleugel gemaakt en weet niet of er voldoende sterkte is in eer dergelijke constructie.
Vandaag de eerste tests gedaan met de Climb and dive timer.
Als eerste de Timer op 1 seconde delay gezet en de looptijd op 1 minuut.
Het maximale toerental op 7800 ingesteld.
Volgens E calc kan de Kontronik Kondor 25-65 een toerental halen van 7965 met een 14X7 APC propeller.
Het aanzetten van de timer is heel cryptisch in de gebruiksaanwijzing.
Het pennetje wat als schakelaar dienst doet kent 2 typen aanrakingen korter dan 1 seconde en 3 seconden.
De korte aanraking is bedoeld om in het bluetooth menu te komen. Na 5 korte aanrakingen gaat het lichtje naar geel en kan de verbinding met de app worden gemaakt.
Om de timer te starten voor normaal gebruik moet het pennetje 3 seconden vast worden gehouden, de motor start dan in dit geval soft op.
Ook de opstart kan je aanpassen.
Wat standaard staat de timer in gesteld op een 14 pool motor.
De Kontronik is een 14 pool motor evenals vele LB E motoren.
Is het anders dan even de juiste aantal polen instellen.
Verder is ook de governor functie op vele manieren in te stellen.
De boost functie is ook instelbaar in percentage, standaard staat deze op 5 %.
De boost functie wordt geactiveerd als het model onder een hoek vliegt , hoog in de bol waarin wij vliegen.
Wat van belang is het maximale toerental te kennen van de motor prop combi, in het menu toerental is de instelling dan lager, de motor moet wel de boost kunnen leveren.
Morgen maar eens de propeller monteren en zien hoe de werking met propeller is.

Als eerste de Timer op 1 seconde delay gezet en de looptijd op 1 minuut.
Het maximale toerental op 7800 ingesteld.
Volgens E calc kan de Kontronik Kondor 25-65 een toerental halen van 7965 met een 14X7 APC propeller.
Het aanzetten van de timer is heel cryptisch in de gebruiksaanwijzing.
Het pennetje wat als schakelaar dienst doet kent 2 typen aanrakingen korter dan 1 seconde en 3 seconden.
De korte aanraking is bedoeld om in het bluetooth menu te komen. Na 5 korte aanrakingen gaat het lichtje naar geel en kan de verbinding met de app worden gemaakt.
Om de timer te starten voor normaal gebruik moet het pennetje 3 seconden vast worden gehouden, de motor start dan in dit geval soft op.
Ook de opstart kan je aanpassen.
Wat standaard staat de timer in gesteld op een 14 pool motor.
De Kontronik is een 14 pool motor evenals vele LB E motoren.
Is het anders dan even de juiste aantal polen instellen.
Verder is ook de governor functie op vele manieren in te stellen.
De boost functie is ook instelbaar in percentage, standaard staat deze op 5 %.
De boost functie wordt geactiveerd als het model onder een hoek vliegt , hoog in de bol waarin wij vliegen.
Wat van belang is het maximale toerental te kennen van de motor prop combi, in het menu toerental is de instelling dan lager, de motor moet wel de boost kunnen leveren.
Morgen maar eens de propeller monteren en zien hoe de werking met propeller is.
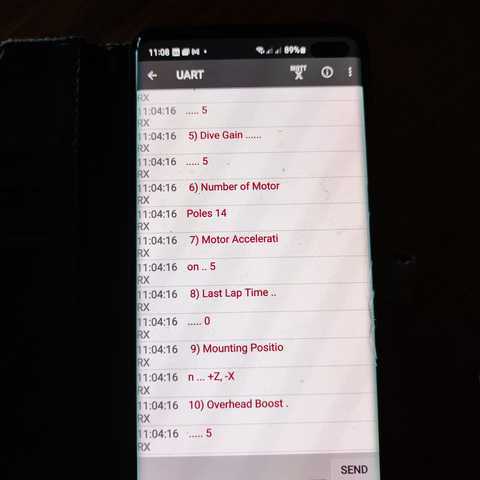

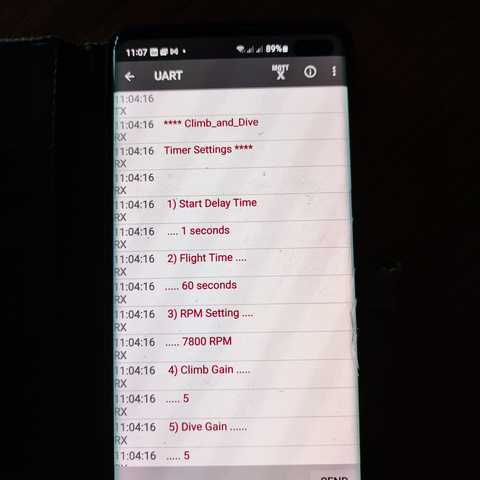
Hierbij wat screenshots van de App met de instellingen.
Even een update van de tests met de Climb and dive Timer.
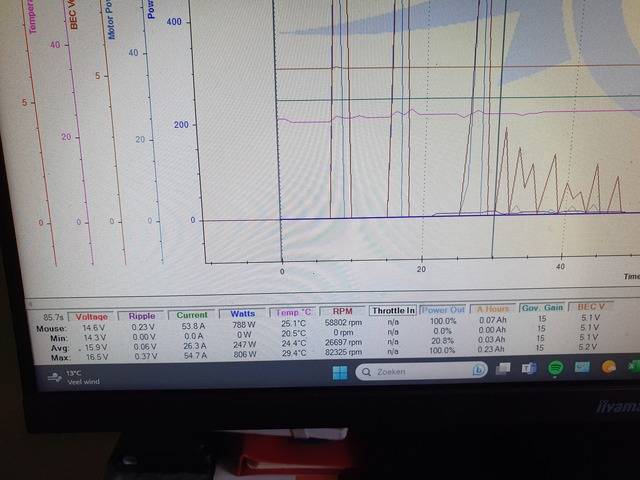
Om eerst de data te controleren van de motor propeller combi is er eerst een Castle creations lite 75 regelaar aan de motor gehangen.
14X7 APC met een Kontronik Kondor 25 65
Het E Calc programma gaf 54 Ampere aan en was aardig exact.
De 804 watt is de maximum belasting van de motor.
Het toerental van deze combinatie is ook hier niet realistisch.
Om het met de optische meter te doen ,gaat even niet het is hiervoor nu te donker.
Er zijn 2 uitdraaien van het logbestand te zien.
De eerste is met alleen de regelaar afgestemd met de motor.
De tweede uitdraai is met de LB governor instellingen.
Gelijk de rem op middel gezet ,hard brake is te heftig.
Ook in de YPE regelaar de brake op middel gezet.
De eerste test runs gemaakt met de climb and dive timer met de YPE regelaar.


De pen om de regelaar aan te zetten is bijzonder onpraktisch in gebruik, ik ga in ieder geval een drukschakelaar aan de timer maken.
De gain voor climb and dive is de standaard 5 % in de CC governor instellingen is dit 30 %.
Niet vergelijkbaar maar toch.
Met het bewegen van de testopstelling merk ik nog niet veel van de power boost.
Enige afstemming van RPM en Gain is mijns inziens noodzakelijk.
In het weekeinde weer verder.
Om eerst de data te controleren van de motor propeller combi is er eerst een Castle creations lite 75 regelaar aan de motor gehangen.
14X7 APC met een Kontronik Kondor 25 65
Het E Calc programma gaf 54 Ampere aan en was aardig exact.
De 804 watt is de maximum belasting van de motor.
Het toerental van deze combinatie is ook hier niet realistisch.
Om het met de optische meter te doen ,gaat even niet het is hiervoor nu te donker.
Er zijn 2 uitdraaien van het logbestand te zien.
De eerste is met alleen de regelaar afgestemd met de motor.
De tweede uitdraai is met de LB governor instellingen.
Gelijk de rem op middel gezet ,hard brake is te heftig.
Ook in de YPE regelaar de brake op middel gezet.
De eerste test runs gemaakt met de climb and dive timer met de YPE regelaar.
De pen om de regelaar aan te zetten is bijzonder onpraktisch in gebruik, ik ga in ieder geval een drukschakelaar aan de timer maken.
De gain voor climb and dive is de standaard 5 % in de CC governor instellingen is dit 30 %.
Niet vergelijkbaar maar toch.
Met het bewegen van de testopstelling merk ik nog niet veel van de power boost.
Enige afstemming van RPM en Gain is mijns inziens noodzakelijk.
In het weekeinde weer verder.
Dank je voor de toevoeging , 8400 RPM met de 14X7 wijkt behoorlijk af van de E Calc berekening van 7950 RPM.
De Climb and dive is nu gelimiteerd op 7800 RPM.
In het weekeind ga ik met de optische toerenteller meten.
De Climb and dive is nu gelimiteerd op 7800 RPM.
In het weekeind ga ik met de optische toerenteller meten.
Misschien overbodig te noemen, op de website circuitflyer.com is de complete gebruiksdocumentatie te vinden. Als ik 'Active Output Functions' begrijp dan kunnen de climb, dive en overheadboost functies pas in de vlucht tot hun recht komen. Hiertoe is het nodig na de start 5 seconden vlakke vlucht aan te houden om tot een stabiele kruissnelheid te komen, daarna tot tien seconden om de timer accellerometer en windconditie data te laten verzamelen t.b.v. een zelfcorrectie procedure. De timer doet dit iedere vlucht.
Je opmerking over de touchpin onderschrijf ik.
Ik heb ook een schakelaar op de tweede en vijfde pin gezet.
Ik heb ook een schakelaar op de tweede en vijfde pin gezet.
Ja, dat je wel in de buurt zit. Ik zou 470 mm nemen.Kan je ook nog iets zeggen over de "" pook"" van 454 mm .
Dat zou ook voor F2B voldoende moeten zijn. Tussen start en wingover zitten 6 vlakke ronden, van 5,3 ~ 5,5 sec. elkMisschien overbodig te noemen, op de website circuitflyer.com is de complete gebruiksdocumentatie te vinden. Als ik 'Active Output Functions' begrijp dan kunnen de climb, dive en overheadboost functies pas in de vlucht tot hun recht komen. Hiertoe is het nodig na de start 5 seconden vlakke vlucht aan te houden om tot een stabiele kruissnelheid te komen, daarna tot tien seconden om de timer accellerometer en windconditie data te laten verzamelen t.b.v. een zelfcorrectie procedure. De timer doet dit iedere vlucht.