stunthenk
PH-SAM
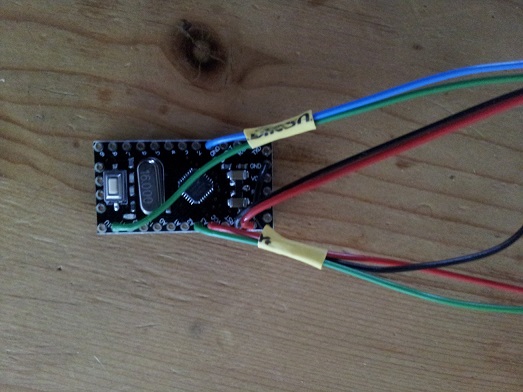
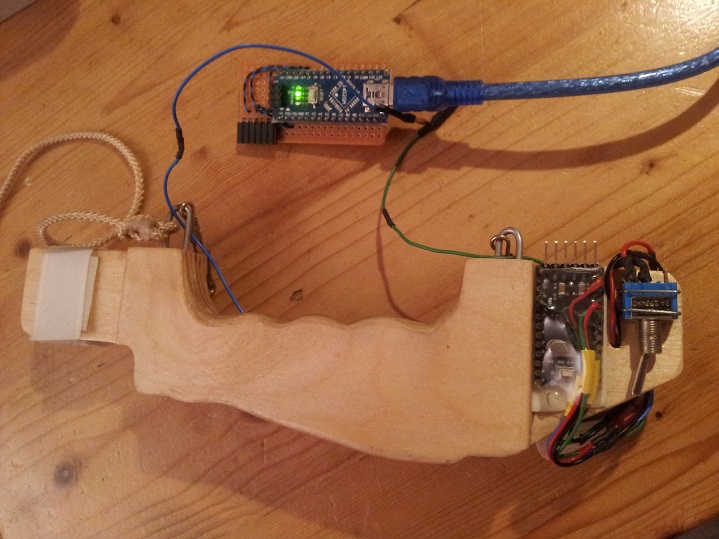
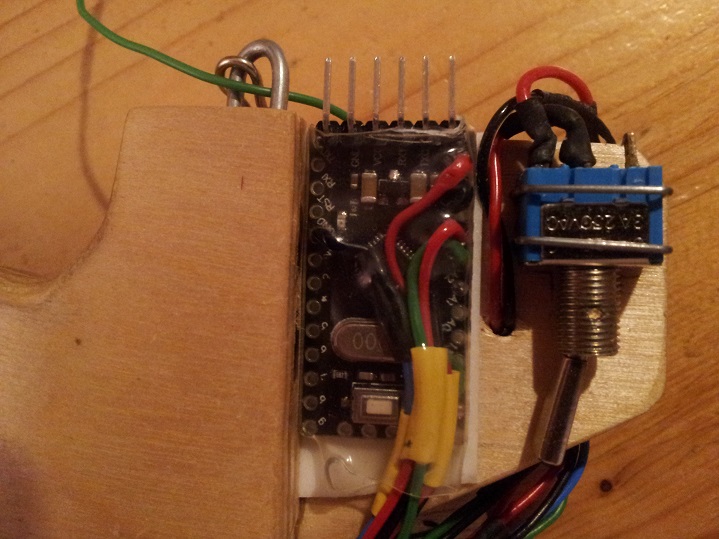
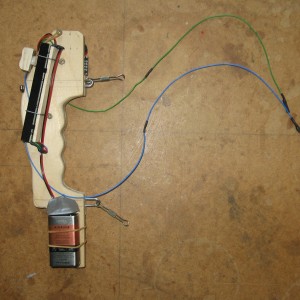
Nadat het rompje erop gelijmd was, heb ik eens gekeken of de aandrijving en de regelarij nog hun plaatsjes kon vinden. Dan krijg je dit:

Tjonge, wat een 'drahtsalat'. Als dat maar goed komt! En voor een volgend model moet ik toch maar eens een wat meer substantieel rompje maken, waar meer van dit gedoe aan het oog kan worden onttrokken.
Toch eerst maar eens het model verder af gemaakt; onderkant romp plaatsen; wielen,

leadouts afwerken; alle verbindingen met epoxy versterken, roerhoorn plaatsen en stootstang van een stukje staaldraad met M2 schroefdraad voorzien voor de connectie met de roerhoorn; gat in de vleugel voor de stootstang optimaal op maat maken (dat betekent dus: groter maken!).

En ten slotte toch maar de stoute schoenen aangetrokken en het piepkleine sjabloontje voor de ankers op de richtingsroeren uitgesneden.

Morgen eerst maar eens de ankers met een laagje blanke lak bedekken, anders beschadigen ze later te snel.
Tjonge, wat een 'drahtsalat'. Als dat maar goed komt! En voor een volgend model moet ik toch maar eens een wat meer substantieel rompje maken, waar meer van dit gedoe aan het oog kan worden onttrokken.
Toch eerst maar eens het model verder af gemaakt; onderkant romp plaatsen; wielen,
leadouts afwerken; alle verbindingen met epoxy versterken, roerhoorn plaatsen en stootstang van een stukje staaldraad met M2 schroefdraad voorzien voor de connectie met de roerhoorn; gat in de vleugel voor de stootstang optimaal op maat maken (dat betekent dus: groter maken!).
En ten slotte toch maar de stoute schoenen aangetrokken en het piepkleine sjabloontje voor de ankers op de richtingsroeren uitgesneden.
Morgen eerst maar eens de ankers met een laagje blanke lak bedekken, anders beschadigen ze later te snel.






") ), is de gevoeligheid te groot. Zoals Henk al opmerkte regelt alles daar te abrupt.
), is de gevoeligheid te groot. Zoals Henk al opmerkte regelt alles daar te abrupt.