Aangezien er volgens mij nog geen thread is over de PixHawk start ik er hier maar eentje.
Advanced Pixhawk Quadcopter Wiring Chart | ArduCopter
Gisteren aangekregen via een Belgische shop.
De reden van de aankoop is dat ik super tevreden ben van de APM port voor de OpenPilot REVO. Dat werkt prachtig, met meer features dan de originele FW voor de REVO. RTL, Loiter en dergelijke alsook telemetry met Nexus 7 zijn mogelijk. Ik wou dus zeker het origineel ook uitproberen dus PixHawk besteld met GPS/Compass combo en snelheidsensor voor planes.
Eerste opmerkingen:
+ Mooi uitgevoerd met veel LEDs en mooie behuizing.
+ Geleverd met stroomsensor, SD card, power button met LED en buzzer.
+ Goede connectors.
+ FW lijkt me nu meer volwassen tegenover de eerste APM.
+ Goede PC programma's zoals MissionPlanner.
+ Goede Droidplanner app voor Android tablets.
+ Compass zit zowel op FC als op GPS module.
+ Handige Logs op SD card.
- Grote controller, > 2x de grootte van de REVO.
- Connectors voor ESCs staan in de lengte richting en maken het ding nog langer.
- Gewicht veel hoger dan REVO. (ong x2.5)
- Geen paaltje bijgeleverd voor de GPS.
- Geen bevestigingsgaten voor FC en GPS, alles moet je kleven op foam.
- SD card zit op lastige plaats als de FC ingebouwd zit in het frame, maar je kan ze wel uitlezen via USB in tegenstelling tot bv de AutoQuad.
Binnenkort zou de FW gebruik kunnen maken van de dubbel uitgevoerde sensors in de PixHawk. Bij uitval zou dus in principe de waarden van de andere sensor gebruikt kunnen worden maw meer zekerheid.
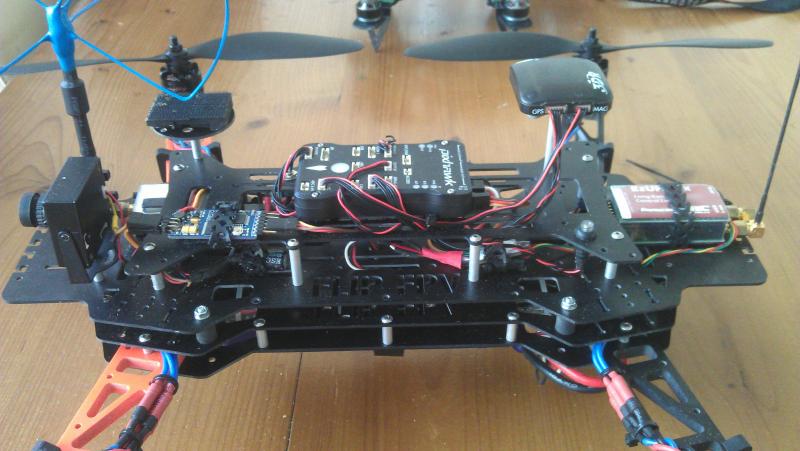
Waarschijnlijk ga ik het geheel gezien zijn afmetingen inbouwen op mijn AutoQuad frame, een Flip FPV. En dan zal de AutoQuad met GPS in de "Te Koop" afdeling belanden. Zeker een goede FC maar de collectie wordt te groot en je vliegt uiteindelijk toch enkel met de laatste aankopen.
Foto's volgen zodra hij ingebouwd is.
Advanced Pixhawk Quadcopter Wiring Chart | ArduCopter
Gisteren aangekregen via een Belgische shop.
De reden van de aankoop is dat ik super tevreden ben van de APM port voor de OpenPilot REVO. Dat werkt prachtig, met meer features dan de originele FW voor de REVO. RTL, Loiter en dergelijke alsook telemetry met Nexus 7 zijn mogelijk. Ik wou dus zeker het origineel ook uitproberen dus PixHawk besteld met GPS/Compass combo en snelheidsensor voor planes.
Eerste opmerkingen:
+ Mooi uitgevoerd met veel LEDs en mooie behuizing.
+ Geleverd met stroomsensor, SD card, power button met LED en buzzer.
+ Goede connectors.
+ FW lijkt me nu meer volwassen tegenover de eerste APM.
+ Goede PC programma's zoals MissionPlanner.
+ Goede Droidplanner app voor Android tablets.
+ Compass zit zowel op FC als op GPS module.
+ Handige Logs op SD card.
- Grote controller, > 2x de grootte van de REVO.
- Connectors voor ESCs staan in de lengte richting en maken het ding nog langer.
- Gewicht veel hoger dan REVO. (ong x2.5)
- Geen paaltje bijgeleverd voor de GPS.
- Geen bevestigingsgaten voor FC en GPS, alles moet je kleven op foam.
- SD card zit op lastige plaats als de FC ingebouwd zit in het frame, maar je kan ze wel uitlezen via USB in tegenstelling tot bv de AutoQuad.
Binnenkort zou de FW gebruik kunnen maken van de dubbel uitgevoerde sensors in de PixHawk. Bij uitval zou dus in principe de waarden van de andere sensor gebruikt kunnen worden maw meer zekerheid.
Waarschijnlijk ga ik het geheel gezien zijn afmetingen inbouwen op mijn AutoQuad frame, een Flip FPV. En dan zal de AutoQuad met GPS in de "Te Koop" afdeling belanden. Zeker een goede FC maar de collectie wordt te groot en je vliegt uiteindelijk toch enkel met de laatste aankopen.
Foto's volgen zodra hij ingebouwd is.




")
")