Goed, vandaag even de Alulah onder handen genomen en flink wat wijzigingen doorgevoerd, onder andere:
- Gestabiliseerde camera voeding voor 4S > 12V
- 60A ESC i.p.v. 40A
- Zwaardere motor
- Aanpassingen aan de neus en motor bevestiging
Origineel lag er een 3542 1000kV motor in, met een 13x6.5 Aeronaut klapprop en 2x 3S/5000/20C, maar het vermogen van deze combinatie was voor mijn doen net niet genoeg, ook de efficientie van motor/prop/LiPo kon beter. Het rendement van pakweg 75% van de motor is op zich niet slecht, maar door de combinatie motor/ESC/LiPo is het RPM gewoon te laag en werkt de propellor remmend bij het aanduiken, de kist duikt sneller met motor uit.
Omdat je op 3S feitelijk niet veel kanten uit kunt ben ik voor de nieuwe motor/prop/LiPo combinatie uitgegaan van een 4S/5000/20C LiPo. Voor de motor kom ik uit op een iets zwaardere motor met ~800kV en een 12x8 Aeronaut klapprop. Daarmee ligt het rendement nu zo'n 10% hoger, waarmee het verlies in de motor nu zo'n 60W bedraagt, da's een aanmerkelijke verbetering t.o.v. de originele situatie waarbij het verlies >100W was.
Omdat ik netto pakweg zo'n 150W meer vermogen heb met de nieuwe combinatie heb ik ervoor gekozen de motorspant opnieuw in te lijmen en van grotere koelgaten te voorzien. Onderstaand is geïllustreerd hoe ik dit heb aangepakt. Ik heb eerst twee nieuwe motorspanten gemaakt uit 1.5mm printplaat (epoxy-glasvezel), en deze vervolgens voorop en achterop de originele motorspant verlijmd met 5-min epoxy. Doordat ik de gaten vooraf al had geboord kon ik deze gebruiken om e.e.a. exact uit te lijnen.
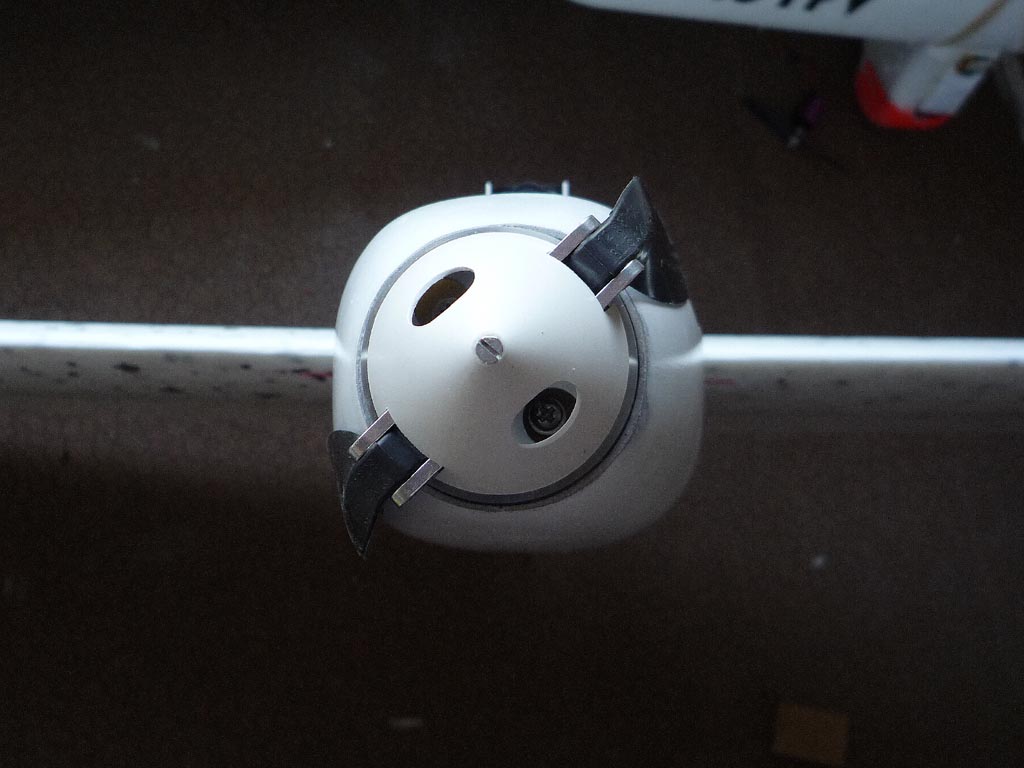
Zoals te zien krijgt de motor zowel koeling over de wikkelingen, als over de motorbel, dus daarmee zou er voldoende koeling voorhanden moeten zijn. De aluminium bodemplaat van de spinner zelf is ook voorzien van gaten, alsook de spinner zelf. Daarmee hoop ik voldoende koeling te hebben voor de motor.
Waarschijnlijk ga ik vanavond e.e.a. uitproberen en dan moet blijken of de nieuwe motor/prop/LiPo combinatie beter voldoet aan mijn wensen dan de originele.
Met vriendelijke groet,
Sander Sassen
ImmersionRC - Real Virtuality

")
")