Aangezien er op 'ons' forum nog geen verzameldraadje is van deze kist en ik er wat vragen over kreeg heb ik toch maar een topic aangemaakt over de Joker XL van Pichler.
Een tijdje geleden heb ik deze kist aan geschaft omdat ik een 6S sleper wilde hebben waarmee ik met wat vliegmaatjes een beetje kon slepen voor erbij. Ik ga er geen vliegmeetings mee af struinen om uren achtereen de ene na de andere gigantsiche schaalbak de lucht in te sleuren maar ik wil wel wat 'gewone' zwevers tot een kilo of 3 a 4 een paar keer omhoog kunnen trekken.
Ik wilde hier mijn eigenbouw StolCub voor gebruiken maar na een middagje proberen moest ik de conclusie trekken dat mijn 160cm span Cub, met 6S en rond de 1100W, zwaar overpowerd was en met vol vermogen zeer onrustig en niet heel betrouwbaar te sturen was. (gewoon los vliegend is het wel een leuk ding dus hij blijft in de hangar maar niet om te slepen)
Een beetje zoekende naar "Wat dan??" ben ik bij de Joker XL uitgekomen.
Mijn redenen om deze te kiezen waren:
- 2meter spanwijdte om op 200-250mtr hoogte beter zichtbaar te zijn dan de Cub.
- geen schaal tierelantijnen maar puur functioneel van vorm, dus ook geen overbodig gewicht
- Mogelijkheid van delen van de rolroeren want ik vind Flaps gewoon ontzettend leuk!
- standaard aanwezige sleepkoppeling
- wordt geadverteerd als 6S sleper dus kan mijn 6s setup er zo op schroeven
- volgens het beetje wat ik er van online heb gevonden moet het een zeer brave kist zijn om te vliegen, dát is wel fijn want (leren)slepen is lastig genoeg om niet ook een lastige sleepkist te moeten besturen (daar kwam ik met de StolCub wel achter)
Ik had de doos snel in huis en in de basis is de afbouw zo netjes uitgelegd, voorbereid en oninteressant dat ik daar geen foto's van heb gemaakt, biinnen een paar avonden op zolder stond er al een redelijk vliegklaar model in de woonkamer.

Ik ben in 1ste instantie maar op 2 punten af geweken van het originele model.
De 1ste is het staartwiel. Het idee van de bouwdoos is dat je het staartwiel, door het hoogteroer heen, vast lijmt in het richtingroer. Als je dit doet is het stabilo niet meer demontabel en dat laatste leek mij nu juist best handig dus heb ik bij Hangar een mooi wieltje besteld:

En deze met een blauwe bowdenkabel, die ik nog in de rommellade had liggen, aangestuurd met een standaardservo die ik zo in het plankje in de romp kon schroeven.
De bowdenkabel heb ik met smeltlijm voor en achter in de romp op 2 punten vast gezet, de flexibiliteit van deze aansturing, voor een stuurvlak totaal onbruikbaar, leek mij een handige schokbreker voor de servo tijdens het taxien.
Ik heb hem met een y-kabeltje parallel aan de Ri-servo aangesloten.
2de verandering is de sleepkoppeling.
Bij de originele constructie, waar ik geen foto van heb, komt alle trekkracht van de sleep direkt door op de arm van de servo. Die wordt dan heel zwaar belast en overal lees je dat dat niet handig is dus heb ik dat anders gedaan. Ik heb de sleepkoppeling van PH-AJH's Ibis sleper nagemaakt
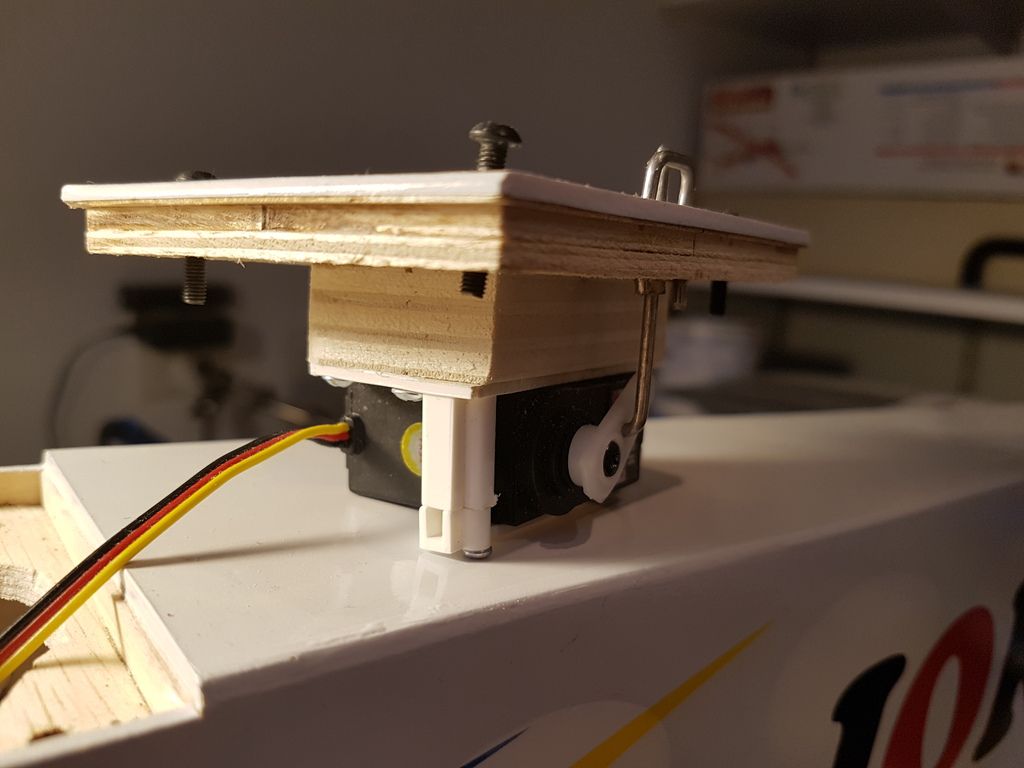
Het originele sleepkoppelingplaatje heb ik met wat extra multiplex opgedikt zodat er een beetje afstand ontstond naar de servo. Zo kon ik een verenstalen as recht naar boven door de plankjes heen laten gaan. Daar zit dan op zijn beurt weer een verenstalen U-beugeltje in gelijmd.

Over de plaats van de koppeling achter de vleugel maak ik mij geen zorgen. Ten 1ste staat Youtube vol met succesvolle sleepfilmpjes van de XL met de koppeling op die plek, ten 2de zat hij op mij Pawnee nog verder naar achteren en dat ging probleemloos omhoog.
De aandrijving had ik zoals gezegd al in huis. Dit is de Dymond GTX5052, een buitenloper met een kv van 410 omw/Volt, die met een 16X8 Menz-propellor statisch net geen 1200W trekt.

De in de romp aangebrachte inslagmoeren komen precies overeen met het montagekruis van de motor dus die zat er ook in een paar minuten op. Alleen bleek die motor aan de korte kant dus ik moest aardig wat vulringen plaatsen om de propeller vrij te laten gaan van de rompzijkanten. (nu ik dit opschrijf bedenk ik mij dat ik daar ook een stukje van af had kunnen zagen)
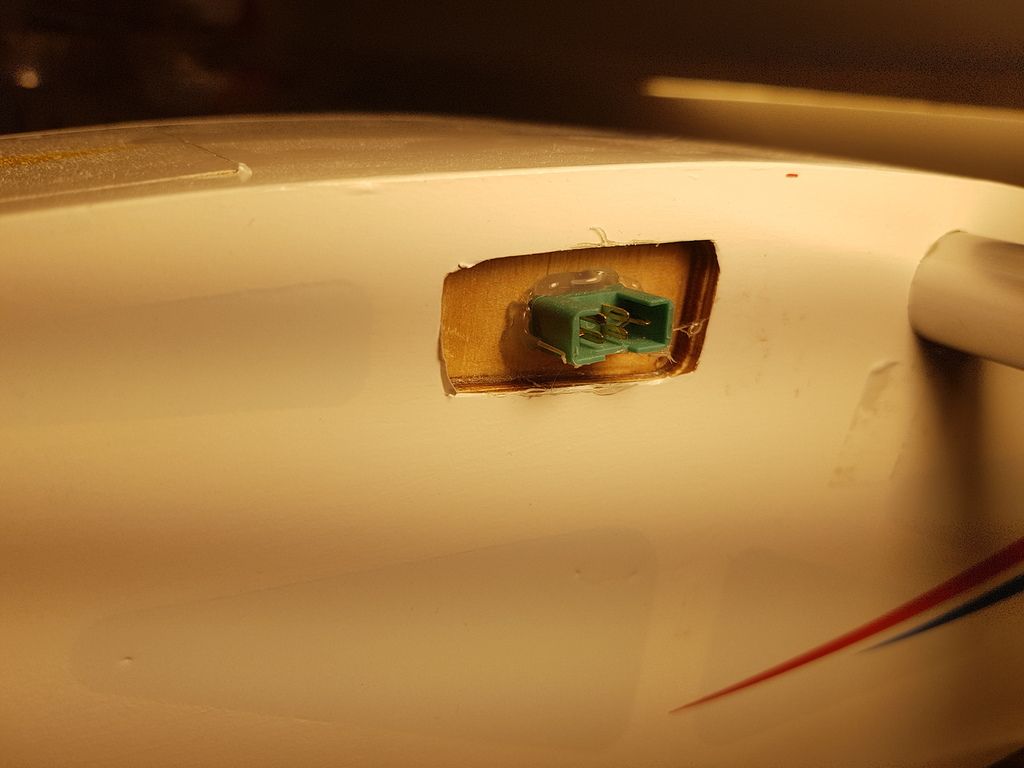
Voor de vleugelstekkers heb ik een plaatje in de romp gelijmd waar op zijn beurt weer een multiplex stekkers met smeltlijm op zit zodat de vleugels snel aangesloten zijn.
De accu’s, in mijn geval 6S4600’s van GensAce, zitten volgens beschrijving met een paar klitteband-dingen vast op de in de romp aangebrachte plaat.
De voeding wilde ik niet via de BEC van de regelaar laten gaan omdat er uiteindelijk 8 servo's in komen en hij al best aan de grens zit van wat hij mag. De Dymond Smart 60 mag 60A op 6S doorlaten en ik tikte statisch net de 50A.
Zodoende heb ik een 5A turnigy BEC, gevoed met een 2S2600 lipo waar helemaal voor in de romp nog ruimte genoeg voor was, gebruikt voor de stroom voorziening.
Ondanks alle accu’s maximaal naar voren moest ik, vanwege de toch wel lichte motor, nog 360gram lood in de neus plaatsen om het CG goed te krijgen maar zo stond hij er dus in principe klaar voor en ging ik er mee bij vliegmaatje Terence langs om eens te kijken en vergelijken met zijn zelfbouw-romp met Protech Ibis vleugels.

Hier kwam ik achter een paar problemen
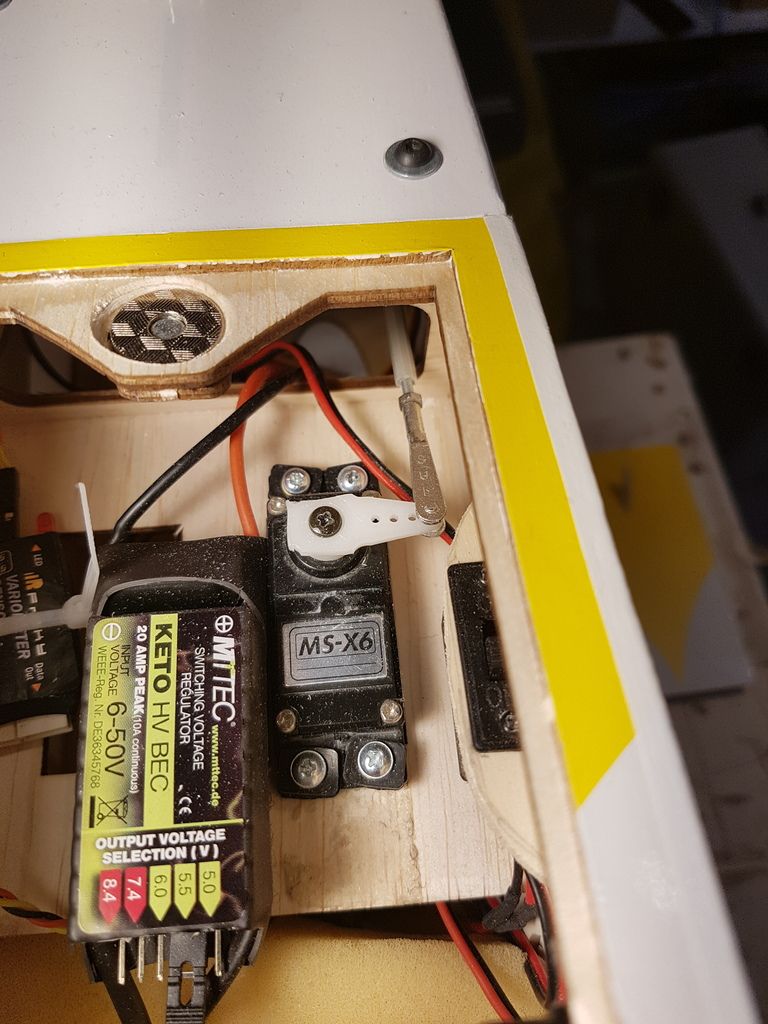
De 1ste en meest gevaarlijke: die El Cheapo 5A bec kon totaal niet overweg met 8 standaard servo’s! Bij snel Links-Rechts rolroer sturen zakte het Voltage meteen in en ging de ontvanger in de failsave. Die moest er dus rap uit en heb ik vervangen door een hele dikke BEC van Hoellein die je op het 3de plaatje hierboven naast de staartwielservo ziet zitten.
2de probleem was de accumontage. Wat een verschrikkelijk geklooi om die $#&&$%*^*@#klittebandjes om de accu te krijgen en nóg zat het niet echt vast. Hier moest ik nog iets op verzinnen.
En het 3de was niet echt een gevaarlijk probleem maar meer een luxe-probleem.
Ik vond die motor van Terence veel mooier dan de mijne

En het dymond motortje ziet er dan ineens wel heel erg zielig uit.
Daarnaast kwam ik, pratend met Terence over het beoogde doel en welke kisten we er mee willen kunnen slepen, tot de conclusie dat mijn aandrijving waarschijnlijk aan de magere kant gaat zijn.
Ik wil dat de kist mijn Twin Astir van 4,7kilo moet kunnen trekken en Terence heeft nog een iets groter object op de To-Do lijst staan en het zou wel leuk zijn als ik die er t.z.t. ook achter kan hangen en dat gaat hier dus niet mee lukken.
Toen ik 1 en 1 een paar keer bij elkaar opgeteld had en nog een weekje heb lopen wikken en wegen heb ik toch maar besloten om de setup op te schalen naar 8S.
Ik moest tóch al nieuwe accus aanschaffen want met proefdraaien bleken mijn 6de hands Gensace’s totaal niet in staat om nog een beetje vermogen te leveren en ik WILDE gewoon ook die mooie Pichler motor!!
Zo gezegd Zo gedaan en toen ik na weer een weekje werken thuis kwam lag er een leuk pakketje klaar met een Pichler Boost 120, een SCON 120 regelaar, een programmeerbox en een houten Fiala 19x8 elektroprop. Deze setup zal ronde 1500W moeten trekken.

Door het verschil in afmeting kon ik die niet meer zo 1:1 aan het motorschot schroeven dus heb ik van een stuk kwaliteits Multiplex een adapterplaat gemaakt die tussen de afstandhouders en de motor komt en waarmee de motor mooi in het neusje past.
Eventuele aanpassingen in domp en zijwaartstelling kan ik hier ook nog in sleutelen als dat nodig zou blijken.

Nu was ik blij dat ik die wangen niet korter gezaagd heb!!
Voor de Accu’s heb ik gekozen voor 2 x SLS Xtron 4S4000’s die met een adapterkabel in serie geschakeld worden en zo voor 8S zorgen.
En om die in de romp kwijt te kunnen heb ik van gamma-ply een accubak gemaakt waar ze ruim in passen.

Ik heb schuimen vulstukken gebruikt, niet op de foto, om ze lekker klem te laten zitten en die bak heb ik op zijn beurt weer in de romp gelijmd op zo’n plek dat ik nu zonder lood toevoegen wél op het juiste CG uit komt.

En als laatste vond ik de originele 10cm wieltjes veel te klein ogen. Ik heb ze vervangen voor de wielen van de Funcub XL die ik eerst op de StolCub had zitten. Daar zitten nu op hun beurt de Joker wielen op, ziet er op die kist nog net goed genoeg uit en op de Joker zorgen de 14cm wielen voor een beetje meer grondspeling

En zo staat ze nu te wachten op de 1ste vluchtjes. Ik ben reuze benieuwd naar hoe ze vliegt!
Een tijdje geleden heb ik deze kist aan geschaft omdat ik een 6S sleper wilde hebben waarmee ik met wat vliegmaatjes een beetje kon slepen voor erbij. Ik ga er geen vliegmeetings mee af struinen om uren achtereen de ene na de andere gigantsiche schaalbak de lucht in te sleuren maar ik wil wel wat 'gewone' zwevers tot een kilo of 3 a 4 een paar keer omhoog kunnen trekken.
Ik wilde hier mijn eigenbouw StolCub voor gebruiken maar na een middagje proberen moest ik de conclusie trekken dat mijn 160cm span Cub, met 6S en rond de 1100W, zwaar overpowerd was en met vol vermogen zeer onrustig en niet heel betrouwbaar te sturen was. (gewoon los vliegend is het wel een leuk ding dus hij blijft in de hangar maar niet om te slepen)
Een beetje zoekende naar "Wat dan??" ben ik bij de Joker XL uitgekomen.
Mijn redenen om deze te kiezen waren:
- 2meter spanwijdte om op 200-250mtr hoogte beter zichtbaar te zijn dan de Cub.
- geen schaal tierelantijnen maar puur functioneel van vorm, dus ook geen overbodig gewicht
- Mogelijkheid van delen van de rolroeren want ik vind Flaps gewoon ontzettend leuk!
- standaard aanwezige sleepkoppeling
- wordt geadverteerd als 6S sleper dus kan mijn 6s setup er zo op schroeven
- volgens het beetje wat ik er van online heb gevonden moet het een zeer brave kist zijn om te vliegen, dát is wel fijn want (leren)slepen is lastig genoeg om niet ook een lastige sleepkist te moeten besturen (daar kwam ik met de StolCub wel achter)
Ik had de doos snel in huis en in de basis is de afbouw zo netjes uitgelegd, voorbereid en oninteressant dat ik daar geen foto's van heb gemaakt, biinnen een paar avonden op zolder stond er al een redelijk vliegklaar model in de woonkamer.
Ik ben in 1ste instantie maar op 2 punten af geweken van het originele model.
De 1ste is het staartwiel. Het idee van de bouwdoos is dat je het staartwiel, door het hoogteroer heen, vast lijmt in het richtingroer. Als je dit doet is het stabilo niet meer demontabel en dat laatste leek mij nu juist best handig dus heb ik bij Hangar een mooi wieltje besteld:
En deze met een blauwe bowdenkabel, die ik nog in de rommellade had liggen, aangestuurd met een standaardservo die ik zo in het plankje in de romp kon schroeven.
De bowdenkabel heb ik met smeltlijm voor en achter in de romp op 2 punten vast gezet, de flexibiliteit van deze aansturing, voor een stuurvlak totaal onbruikbaar, leek mij een handige schokbreker voor de servo tijdens het taxien.
Ik heb hem met een y-kabeltje parallel aan de Ri-servo aangesloten.
2de verandering is de sleepkoppeling.
Bij de originele constructie, waar ik geen foto van heb, komt alle trekkracht van de sleep direkt door op de arm van de servo. Die wordt dan heel zwaar belast en overal lees je dat dat niet handig is dus heb ik dat anders gedaan. Ik heb de sleepkoppeling van PH-AJH's Ibis sleper nagemaakt
Het originele sleepkoppelingplaatje heb ik met wat extra multiplex opgedikt zodat er een beetje afstand ontstond naar de servo. Zo kon ik een verenstalen as recht naar boven door de plankjes heen laten gaan. Daar zit dan op zijn beurt weer een verenstalen U-beugeltje in gelijmd.
Over de plaats van de koppeling achter de vleugel maak ik mij geen zorgen. Ten 1ste staat Youtube vol met succesvolle sleepfilmpjes van de XL met de koppeling op die plek, ten 2de zat hij op mij Pawnee nog verder naar achteren en dat ging probleemloos omhoog.
De aandrijving had ik zoals gezegd al in huis. Dit is de Dymond GTX5052, een buitenloper met een kv van 410 omw/Volt, die met een 16X8 Menz-propellor statisch net geen 1200W trekt.
De in de romp aangebrachte inslagmoeren komen precies overeen met het montagekruis van de motor dus die zat er ook in een paar minuten op. Alleen bleek die motor aan de korte kant dus ik moest aardig wat vulringen plaatsen om de propeller vrij te laten gaan van de rompzijkanten. (nu ik dit opschrijf bedenk ik mij dat ik daar ook een stukje van af had kunnen zagen)
Voor de vleugelstekkers heb ik een plaatje in de romp gelijmd waar op zijn beurt weer een multiplex stekkers met smeltlijm op zit zodat de vleugels snel aangesloten zijn.
De accu’s, in mijn geval 6S4600’s van GensAce, zitten volgens beschrijving met een paar klitteband-dingen vast op de in de romp aangebrachte plaat.
De voeding wilde ik niet via de BEC van de regelaar laten gaan omdat er uiteindelijk 8 servo's in komen en hij al best aan de grens zit van wat hij mag. De Dymond Smart 60 mag 60A op 6S doorlaten en ik tikte statisch net de 50A.
Zodoende heb ik een 5A turnigy BEC, gevoed met een 2S2600 lipo waar helemaal voor in de romp nog ruimte genoeg voor was, gebruikt voor de stroom voorziening.
Ondanks alle accu’s maximaal naar voren moest ik, vanwege de toch wel lichte motor, nog 360gram lood in de neus plaatsen om het CG goed te krijgen maar zo stond hij er dus in principe klaar voor en ging ik er mee bij vliegmaatje Terence langs om eens te kijken en vergelijken met zijn zelfbouw-romp met Protech Ibis vleugels.
Hier kwam ik achter een paar problemen
De 1ste en meest gevaarlijke: die El Cheapo 5A bec kon totaal niet overweg met 8 standaard servo’s! Bij snel Links-Rechts rolroer sturen zakte het Voltage meteen in en ging de ontvanger in de failsave. Die moest er dus rap uit en heb ik vervangen door een hele dikke BEC van Hoellein die je op het 3de plaatje hierboven naast de staartwielservo ziet zitten.
2de probleem was de accumontage. Wat een verschrikkelijk geklooi om die $#&&$%*^*@#klittebandjes om de accu te krijgen en nóg zat het niet echt vast. Hier moest ik nog iets op verzinnen.
En het 3de was niet echt een gevaarlijk probleem maar meer een luxe-probleem.
Ik vond die motor van Terence veel mooier dan de mijne
En het dymond motortje ziet er dan ineens wel heel erg zielig uit.
Daarnaast kwam ik, pratend met Terence over het beoogde doel en welke kisten we er mee willen kunnen slepen, tot de conclusie dat mijn aandrijving waarschijnlijk aan de magere kant gaat zijn.
Ik wil dat de kist mijn Twin Astir van 4,7kilo moet kunnen trekken en Terence heeft nog een iets groter object op de To-Do lijst staan en het zou wel leuk zijn als ik die er t.z.t. ook achter kan hangen en dat gaat hier dus niet mee lukken.
Toen ik 1 en 1 een paar keer bij elkaar opgeteld had en nog een weekje heb lopen wikken en wegen heb ik toch maar besloten om de setup op te schalen naar 8S.
Ik moest tóch al nieuwe accus aanschaffen want met proefdraaien bleken mijn 6de hands Gensace’s totaal niet in staat om nog een beetje vermogen te leveren en ik WILDE gewoon ook die mooie Pichler motor!!
Zo gezegd Zo gedaan en toen ik na weer een weekje werken thuis kwam lag er een leuk pakketje klaar met een Pichler Boost 120, een SCON 120 regelaar, een programmeerbox en een houten Fiala 19x8 elektroprop. Deze setup zal ronde 1500W moeten trekken.
Door het verschil in afmeting kon ik die niet meer zo 1:1 aan het motorschot schroeven dus heb ik van een stuk kwaliteits Multiplex een adapterplaat gemaakt die tussen de afstandhouders en de motor komt en waarmee de motor mooi in het neusje past.
Eventuele aanpassingen in domp en zijwaartstelling kan ik hier ook nog in sleutelen als dat nodig zou blijken.
Nu was ik blij dat ik die wangen niet korter gezaagd heb!!
Voor de Accu’s heb ik gekozen voor 2 x SLS Xtron 4S4000’s die met een adapterkabel in serie geschakeld worden en zo voor 8S zorgen.
En om die in de romp kwijt te kunnen heb ik van gamma-ply een accubak gemaakt waar ze ruim in passen.
Ik heb schuimen vulstukken gebruikt, niet op de foto, om ze lekker klem te laten zitten en die bak heb ik op zijn beurt weer in de romp gelijmd op zo’n plek dat ik nu zonder lood toevoegen wél op het juiste CG uit komt.
En als laatste vond ik de originele 10cm wieltjes veel te klein ogen. Ik heb ze vervangen voor de wielen van de Funcub XL die ik eerst op de StolCub had zitten. Daar zitten nu op hun beurt de Joker wielen op, ziet er op die kist nog net goed genoeg uit en op de Joker zorgen de 14cm wielen voor een beetje meer grondspeling
En zo staat ze nu te wachten op de 1ste vluchtjes. Ik ben reuze benieuwd naar hoe ze vliegt!
Laatst bewerkt:


")

