hier heb ik er besteld... 18650 Rechargeable Lithium LiFePO4 Battery (1350mAh) - Free Shipping - DealExtreme
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Project Pilatus B4
- Topicstarter Ariel
- Startdatum
Ariel
PH-SAM
Dirk, ACTeurope is een kleine firma en heeft geen concurrerende prijzen in vergelijking met prijsvechters.
Ik ben mij van bewust dat altijd wel ergens een gek is die lagere prijzen hanteert, dat is altijd zo geweest en zal ook altijd zo blijven.
Voor mij is het altijd een overweging of ik het iemand wel of niet gun.
Voor het laden van al mijn accu's heb ik een Graupner ULTRAMAT 16, daarmee verwacht ik geen problemen.
Trouwens, bij Höllein en Lindinger bestel ik ook regelmatig modelbouwproducten.
Hun prijsstelling is mij bekend.
Johannes
Ik ben mij van bewust dat altijd wel ergens een gek is die lagere prijzen hanteert, dat is altijd zo geweest en zal ook altijd zo blijven.
Voor mij is het altijd een overweging of ik het iemand wel of niet gun.
Voor het laden van al mijn accu's heb ik een Graupner ULTRAMAT 16, daarmee verwacht ik geen problemen.
Trouwens, bij Höllein en Lindinger bestel ik ook regelmatig modelbouwproducten.
Hun prijsstelling is mij bekend.
Johannes
Ariel
PH-SAM
hier heb ik er besteld... 18650 Rechargeable Lithium LiFePO4 Battery (1350mAh) - Free Shipping - DealExtreme

Nu snap ik waarom deze accu's zo goedkoop zijn.:rolling:
Johannes
Nu snap ik waarom deze accu's zo goedkoop zijn.:rolling:
Johannes

DirkSchipper
Forum veteraan
LOL, ik dacht precies hetzelfde.Nu snap ik waarom deze accu's zo goedkoop zijn.:rolling:
Johannes
Overigens, mijn naamgenoot heeft het wel over andere cellen. Nl. 1350 mAh, ipv. de 2300 mAh-cellen waar Johannes en ik het over hadden.
Vwb. prijsvechter vs. en een zaak iets gunnen, dat ben ik wel met je eens. Ik ga ook niet enkel voor de lage prijs. Maar (ruim) 2x zo duur vind ik wel erg veel extra ....
Dirk.
Had ik nog niet gezien dat jullie het over 2300 mAh cellen hadden ")
Waarschijnlijk de oude dag")
Ik plaats telkens twee cellen parallel, daarmee ....of dat beter is ?
Waarschijnlijk de oude dag
Ik plaats telkens twee cellen parallel, daarmee ....of dat beter is ?
Goedkoop is vaak duurkoop.
Schulze elektronik is net als ACTeurope een klein bedrijf met bijzondere producten en een uitstekende service. Een LiPoRXII van 2000 mAh met 7A continustroom afgifte en logfunctie voor stroomafname gedurende een dag vliegen kost dan ook 128 euro. Maar maak je als gebruiker een domme fout met opladen dan nog ruilt Schulze hem zonder meer om voor een nieuwe ook ruim twee jaar na aankoop. Dat vind ik klasse.
Schulze elektronik is net als ACTeurope een klein bedrijf met bijzondere producten en een uitstekende service. Een LiPoRXII van 2000 mAh met 7A continustroom afgifte en logfunctie voor stroomafname gedurende een dag vliegen kost dan ook 128 euro. Maar maak je als gebruiker een domme fout met opladen dan nog ruilt Schulze hem zonder meer om voor een nieuwe ook ruim twee jaar na aankoop. Dat vind ik klasse.
Deze accuweiche heb ik in de " kleine" ASH26 ( 4,7 meter )....
Akkuweiche AW 2
Akkuweiche AW 2
Ariel
PH-SAM
Het hoogteroer servo zit nu vast in het kielvlak met twee M3 schroeven.
Dit klusje was meer werk dan ik dacht. Veel tijd ging verloren met het uitzoeken van de juiste verhoudingen betreffende het aansturen van het hoogteroer zodat het servo zijn kracht optimaal op het hoogteroer kan loslaten.
Ook heb ik het kielvlak met hete lucht behandeld zodat het richtingsroer voldoende bewegingsvrijheid heeft.
Voor mijn gevoel schiet het niet erg op. Maar ja "Gut Ding braucht Weile"

Johannes
Dit klusje was meer werk dan ik dacht. Veel tijd ging verloren met het uitzoeken van de juiste verhoudingen betreffende het aansturen van het hoogteroer zodat het servo zijn kracht optimaal op het hoogteroer kan loslaten.
Ook heb ik het kielvlak met hete lucht behandeld zodat het richtingsroer voldoende bewegingsvrijheid heeft.
Voor mijn gevoel schiet het niet erg op. Maar ja "Gut Ding braucht Weile"
Johannes
Ariel
PH-SAM
Het roerhoorn voor het hoogteroer zat niet in het bouwpakket, dus heb ik maar zelf één gemaakt van 1,5mm epoxy plaat.
Moeilijk was de positiebepaling van het roerhoorn omdat geen tekening met bematingen werd meegeleverd. Dus alles zelf uitzoeken.
Verlijmd heb ik het roerhoorn met UHU Endfest 300 en dat zit nu goed vast.

De stuurstang is gemaakt van een koolstof buis om het gewicht zo laag mogelijk te houden.

Alles werkt naar tevredenheid, dus straks verder met het richtingsroer.

Johannes
Moeilijk was de positiebepaling van het roerhoorn omdat geen tekening met bematingen werd meegeleverd. Dus alles zelf uitzoeken.
Verlijmd heb ik het roerhoorn met UHU Endfest 300 en dat zit nu goed vast.
De stuurstang is gemaakt van een koolstof buis om het gewicht zo laag mogelijk te houden.
Alles werkt naar tevredenheid, dus straks verder met het richtingsroer.
Johannes
DirkSchipper
Forum veteraan
Johannes,
Het is op de foto moeilijk te beoordelen, maar het lijkt erop dat in de nul-stand het servo-armpje haaks opzij staat.
Maar voor een symmetrische werking van je hoogteroer moet die dezelfde hoek hebben als tussen het scharnierpunt van het hoogteroer en het oog van het ruderhorn.
Als u snapt wat ik bedoel ....
Anders maak ik wel een tekeningetje.
Dirk.
Het is op de foto moeilijk te beoordelen, maar het lijkt erop dat in de nul-stand het servo-armpje haaks opzij staat.
Maar voor een symmetrische werking van je hoogteroer moet die dezelfde hoek hebben als tussen het scharnierpunt van het hoogteroer en het oog van het ruderhorn.
Als u snapt wat ik bedoel ....
Anders maak ik wel een tekeningetje.
Dirk.
Ariel
PH-SAM
Dirk, De servoarm staat precies haaks op de servo.
Op de schets is de positie van het roerhoorn te zien.
Zoals je kan zien, het klopt wel.

Uiteraard heb ik het hoogteroer al op werking getest en de roeruitslag is symmetrisch.
De stuurstang loopt volledig vrij. Er zit wel wat minimale speling in het hoogteroer maar deze zit in de metalen tandwielen van het servo en daar kan ik niets aan doen, behalve een ander servo plaatsen.
Johannes
Op de schets is de positie van het roerhoorn te zien.
Zoals je kan zien, het klopt wel.
Uiteraard heb ik het hoogteroer al op werking getest en de roeruitslag is symmetrisch.
De stuurstang loopt volledig vrij. Er zit wel wat minimale speling in het hoogteroer maar deze zit in de metalen tandwielen van het servo en daar kan ik niets aan doen, behalve een ander servo plaatsen.
Johannes
DirkSchipper
Forum veteraan
Ach ja. Pilatus B4. Sterk gepeild kielvlak. sorry, Alzh... wie-ook-al-weer sloeg even toe. 
Dirk.
Dirk.
Het ziet er weer erg strak uit. kijk m'n ogen weer uit. Compliment!
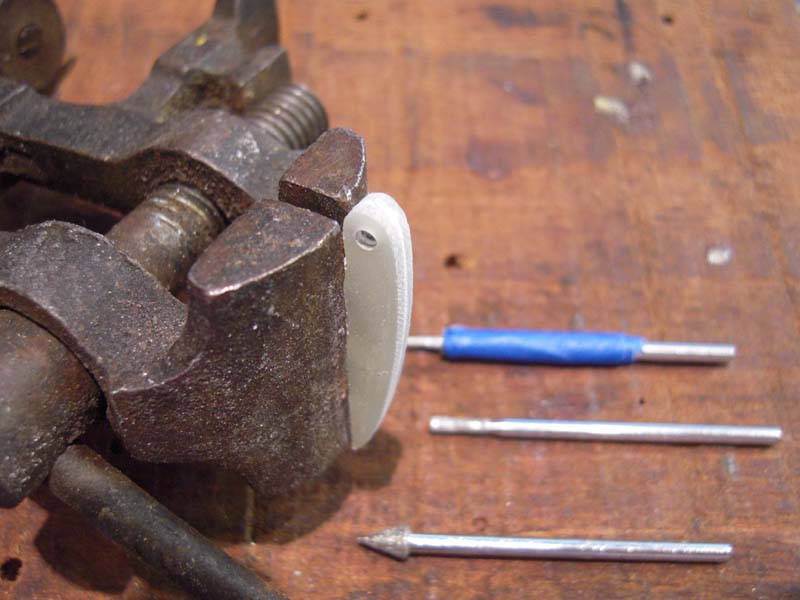
Toch laat ik je -als het vermag- even een eenvoudig voorbeeldje zien hoe ik een vergelijkbare aansturing op de Enigma heb gedaan.
Het stabilo is eenvoudig afneembaar. Het stangetje laat zich ook eenvoudig trimmen met draadeind op het andere einde.
Roerhoorntje is ingelaten in het stuurvlak, het stangetje ligt bijna tegen het vlak.
Roerhoorntje op z'n plaats. Afstand tot aan scharnier gerelateerd tot aan maximale uitslag, waarbij het stangetje, bij de servo, zo dicht mogelijk bij het het hart van de hevel is aangebracht. Het touwtje was om de richting van de stuurstang en plaatsing van de servo inzichtelijk te krijgen...

Hier zie je goed dat de stang tegen het vlak aan licht. Stabilo is zo heel makkelijk afneembaar, de doorboring bovenin door het epoxy van de staart is minimaal...

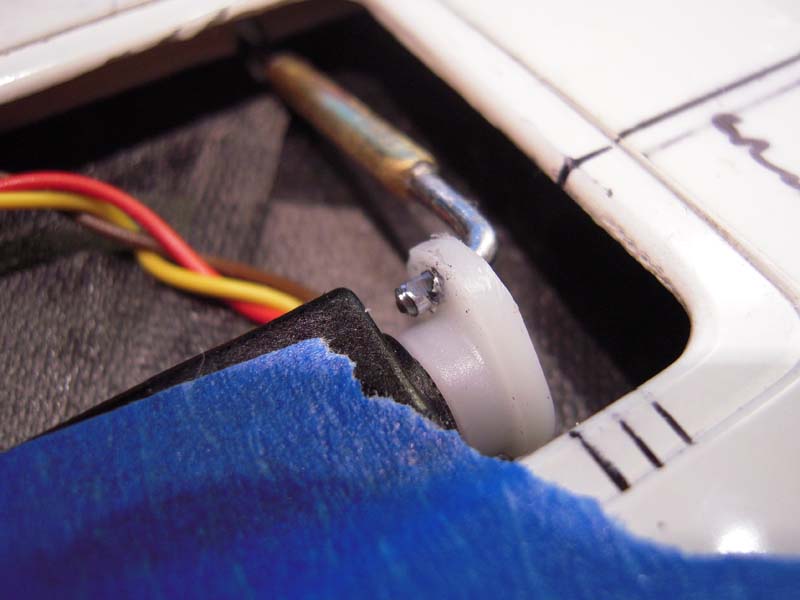
Servo op z'n plek. Messing bus met inwendig M2 draad. De stuurstang kan zo versteld worden en uitgenomen. Ook de Z-bend kan nog uitgenomen worden... zou dat nodig zijn...

In m'n fotobakje heb ik nog meer plaatjes staan betreffende de inbouw van servo's in de Enigma... Aardig wat truckjes geleerd van de F5B jongens
Gr Bas
Toch laat ik je -als het vermag- even een eenvoudig voorbeeldje zien hoe ik een vergelijkbare aansturing op de Enigma heb gedaan.
Het stabilo is eenvoudig afneembaar. Het stangetje laat zich ook eenvoudig trimmen met draadeind op het andere einde.
Roerhoorntje is ingelaten in het stuurvlak, het stangetje ligt bijna tegen het vlak.
Roerhoorntje op z'n plaats. Afstand tot aan scharnier gerelateerd tot aan maximale uitslag, waarbij het stangetje, bij de servo, zo dicht mogelijk bij het het hart van de hevel is aangebracht. Het touwtje was om de richting van de stuurstang en plaatsing van de servo inzichtelijk te krijgen...
Hier zie je goed dat de stang tegen het vlak aan licht. Stabilo is zo heel makkelijk afneembaar, de doorboring bovenin door het epoxy van de staart is minimaal...
Servo op z'n plek. Messing bus met inwendig M2 draad. De stuurstang kan zo versteld worden en uitgenomen. Ook de Z-bend kan nog uitgenomen worden... zou dat nodig zijn...
In m'n fotobakje heb ik nog meer plaatjes staan betreffende de inbouw van servo's in de Enigma... Aardig wat truckjes geleerd van de F5B jongens
Gr Bas
Laatst bewerkt door een moderator:
Het roerhoorn voor het hoogteroer zat niet in het bouwpakket, dus heb ik maar zelf één gemaakt van 1,5mm epoxy plaat.
Moeilijk was de positiebepaling van het roerhoorn omdat geen tekening met bematingen werd meegeleverd. Dus alles zelf uitzoeken.
Verlijmd heb ik het roerhoorn met UHU Endfest 300 en dat zit nu goed vast.
De stuurstang is gemaakt van een koolstof buis om het gewicht zo laag mogelijk te houden.
Alles werkt naar tevredenheid, dus straks verder met het richtingsroer.
Johannes
Misschien een bruikbare tip uit België
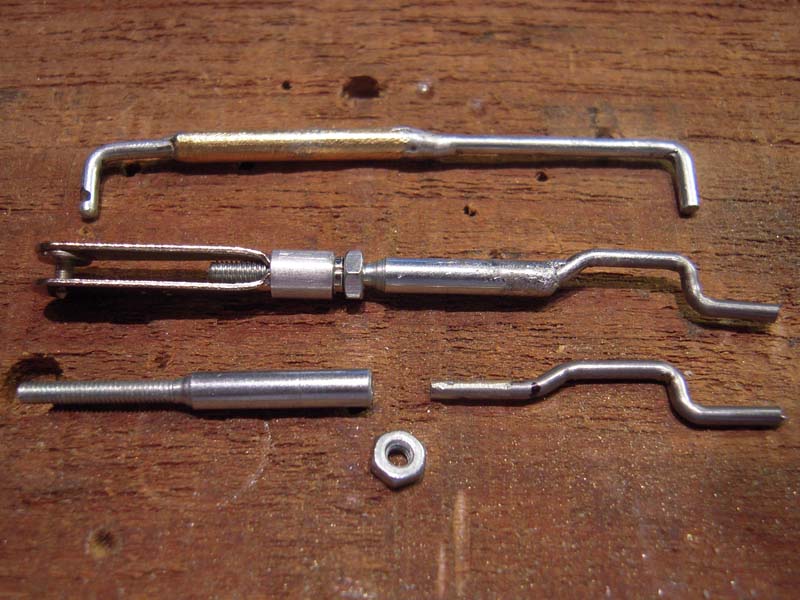
Ik maak tegenwoordig mijn aansturingen zelf , gewoon uit een boutje...
Het boutje op de foto is een M5 boutje dat moet dienen om een 3 mm. kwiklink op te nemen...
Kop eraf gezaagd, twee kanten platgevijld, gaatje 1,5 mm. geboord, moertje er tegen en klaar is kees

De foto's zeggen méér dan woorden...



Het schroefdraadgedeelte kan men op maat ( diepte ) maken en ook met UHU Endfest 300 inlijmen, of eerst een busje met inwendige schroefdraad ( M5 in dit geval ) in het stuurvlak lijmen en daarna het boutje er in draaien ( verzegelen met loctite )
Een rond gat boren is altijd makkelijker dan een gleufje vijlen :idea:
Op een uurtje heb je er meer dan nodig op een vliegtuig/zwever
Laatst bewerkt door een moderator:
OH JA !!!
Het voordeel als je met een extra busje werkt is dat je ook de hoogte kan regelen ( interessant voor bijvoorbeeld rolroeren ivm dezelfde maximum uitslag )
Het voordeel als je met een extra busje werkt is dat je ook de hoogte kan regelen ( interessant voor bijvoorbeeld rolroeren ivm dezelfde maximum uitslag )
Ja! Ook heel mooi gemaakt!
Ik was weer zó bezig geweest... eerst tekenwerk... printje plakken, zagen slijpen en vijlen... Vorm ontstaan door zorgvuldig nameten aan de hand van een proefopstelling en wat Gegevens die Gerben me had verstrekt...
Je plakt daarbij tape op de vleugel. Daarop lijm je met CA het ruwe hevel model. Dan kan je het stuurorgaan live gaan testen. Weet je alles wat je moet weten, dan kan je de tape met test-hoorntje en al zo los trekken zonder de huid van de vleugel te beschadigen. De servo had ik eerst met tape vast gezet... ging niet lekker, en toen met miniem druppie CA... Na het meten kwam ook de servo even makkelijk weer los...
Omdat de Z-bend tang niet lekker werkt bij het exact gelijk maken van stangetjes, heb ik toch maar gebruik gemaakt van messing buis als soldeerhuls om twee uiteinden te verbinden.
Maatvast door middel van een boormalletje. Uiteinden plus huls solderen met de bout. De zwaarste krachten die het stangetje te verduren krijgt, zijn duwkrachten....
Onder zie je verder hoe de aansturing van de flapservo in de fleugel in elkaar steekt. Het haaks gezette stuurstangetje wordt met garen en CA geborgd. (Truckje van GJVO). In het asje is een miniem borgsleufje geslepen, zodat de takeling ook echt goed op de plaats blijft zitten. Met een mesje is de borging altijd weer weg te krassen. Zo krijg je het stangetje ook zo dicht tegen de hevel. Alles werkt zo op de maximum resolutie van de servo, de flaps halen de maximaal benodigde uitslag.

Ik was weer zó bezig geweest... eerst tekenwerk... printje plakken, zagen slijpen en vijlen... Vorm ontstaan door zorgvuldig nameten aan de hand van een proefopstelling en wat Gegevens die Gerben me had verstrekt...
Je plakt daarbij tape op de vleugel. Daarop lijm je met CA het ruwe hevel model. Dan kan je het stuurorgaan live gaan testen. Weet je alles wat je moet weten, dan kan je de tape met test-hoorntje en al zo los trekken zonder de huid van de vleugel te beschadigen. De servo had ik eerst met tape vast gezet... ging niet lekker, en toen met miniem druppie CA... Na het meten kwam ook de servo even makkelijk weer los...
Omdat de Z-bend tang niet lekker werkt bij het exact gelijk maken van stangetjes, heb ik toch maar gebruik gemaakt van messing buis als soldeerhuls om twee uiteinden te verbinden.
Maatvast door middel van een boormalletje. Uiteinden plus huls solderen met de bout. De zwaarste krachten die het stangetje te verduren krijgt, zijn duwkrachten....
Onder zie je verder hoe de aansturing van de flapservo in de fleugel in elkaar steekt. Het haaks gezette stuurstangetje wordt met garen en CA geborgd. (Truckje van GJVO). In het asje is een miniem borgsleufje geslepen, zodat de takeling ook echt goed op de plaats blijft zitten. Met een mesje is de borging altijd weer weg te krassen. Zo krijg je het stangetje ook zo dicht tegen de hevel. Alles werkt zo op de maximum resolutie van de servo, de flaps halen de maximaal benodigde uitslag.
Laatst bewerkt door een moderator:
Ariel
PH-SAM
De twee aluminium hevels worden gebruikt voor het aansturen van het richtingsroer.
Hevel en richtingsroer worden verbonden met een Kevlar draad.
Twee naaldlagers per hevel zullen ervoor zorgen dat alles soepel beweegt.
Het voordeel van deze twee hevels is, dat de voorspanning van de draad niet direct op het servo wordt overgebracht.

Johannes
Hevel en richtingsroer worden verbonden met een Kevlar draad.
Twee naaldlagers per hevel zullen ervoor zorgen dat alles soepel beweegt.
Het voordeel van deze twee hevels is, dat de voorspanning van de draad niet direct op het servo wordt overgebracht.
Johannes
Het voordeel van deze twee hevels is, dat de voorspanning van de draad niet direct op het servo wordt overgebracht.
Johannes
Dat is een goede oplossing Johannes. Spanning van de draad op de servo is inderdaad wel een nadeel van een directe aansluiting bij een pull-pull aansturing. Om die reden heb ik bij mijn Fox gekozen voor een volglas 3mm staaf die door een holle carbon buis loopt. Groeten, Maarten
Ariel
PH-SAM
Deze twee millimeter dikke staaldraad dient als scharnierpen voor het richtingsroer.

In het richtingsroer zit een gat voor de scharnierpen, werkt op zich prima maar daarmee ben ik niet tevreden.

Dus kies ik voor een kogellager wat op de scharnierpen wordt geschoven.
Daarvoor moest eerst een kamer in het richtingsroer worden gefreesd.

Het lager zit nu zonder lijm maar wel met een klempassing vast.

De hevels zijn geplaatst en afgesteld.
Er missen nog de borgmoeren die de twee hevels op hun plaats houden.
Morgen worden eindelijk de kevlar draden van het richtingsroer met de hevels verbonden.

Johannes
In het richtingsroer zit een gat voor de scharnierpen, werkt op zich prima maar daarmee ben ik niet tevreden.
Dus kies ik voor een kogellager wat op de scharnierpen wordt geschoven.
Daarvoor moest eerst een kamer in het richtingsroer worden gefreesd.
Het lager zit nu zonder lijm maar wel met een klempassing vast.
De hevels zijn geplaatst en afgesteld.
Er missen nog de borgmoeren die de twee hevels op hun plaats houden.
Morgen worden eindelijk de kevlar draden van het richtingsroer met de hevels verbonden.
Johannes