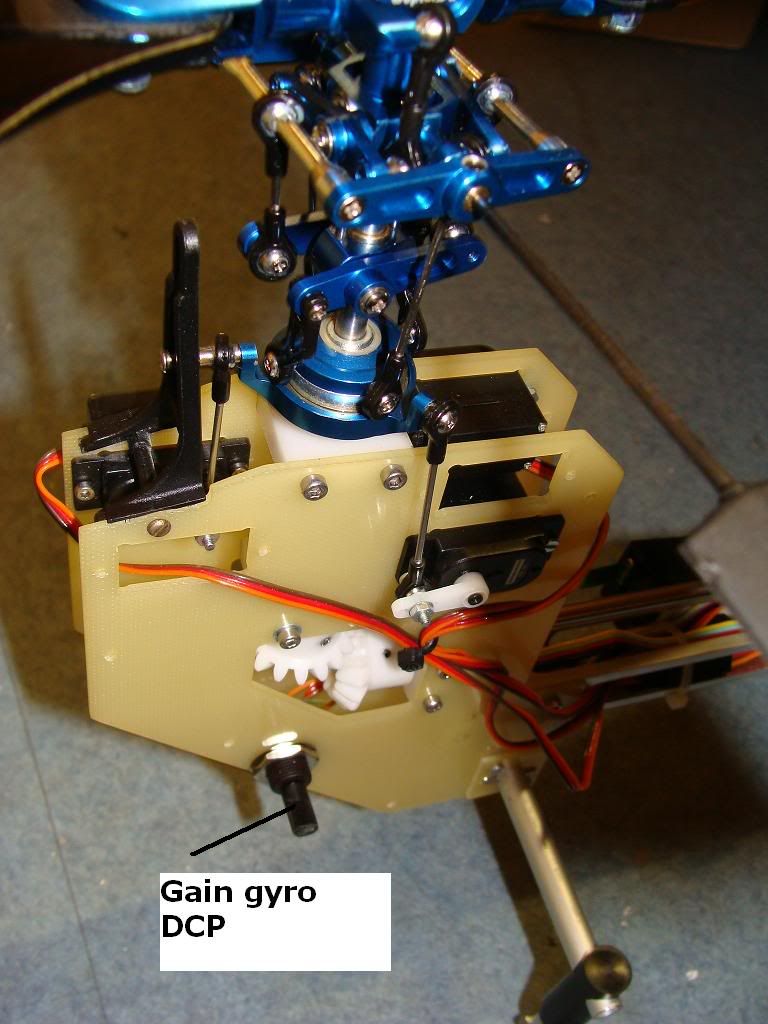
En dan nu het linksdraaiend maken van een rechtsdraaiende kop.
Men neme een standaard Main rotor housing en plaatst de sesaw verkeerd om.

Vervolgens neemt men de mixing arms en zet de ballinks aan de andere kan van de arm en de arm zelf met de andere kant dan normaal tegen de sesaw.

Vervolgens neemt men een standaard washout base en draait die om.
De flens die nu boven aan de washout base zit is veel te groot en moet getrimd worden.

Na het trimmen ziet hij er zo uit: (Ja het is niet recht Maar niet zo scheef als de foto doet vermoeden)
Maar niet zo scheef als de foto doet vermoeden)

Als ik nu voldoende vrijheid heb tot de kop dan laat ik het zo. Als de rand toch nog te hoog is volgt nog een nabewerking. Dit onder het motto: Meer er af kan altijd nog")
De washout controll arms worden normaal gemonteerd en draaien mee om met de washout base. Vervolgens worden de kunststof links naar beneden gedraaid.
Hiermee is de rechtsdraaiende kop linksdraaiend geworden.
Aangezien ik nu één kop heb met bladhouders en één zonder kon ik mooi kijken wat nu de afstand is tussen het Blad en de flybar paddle.
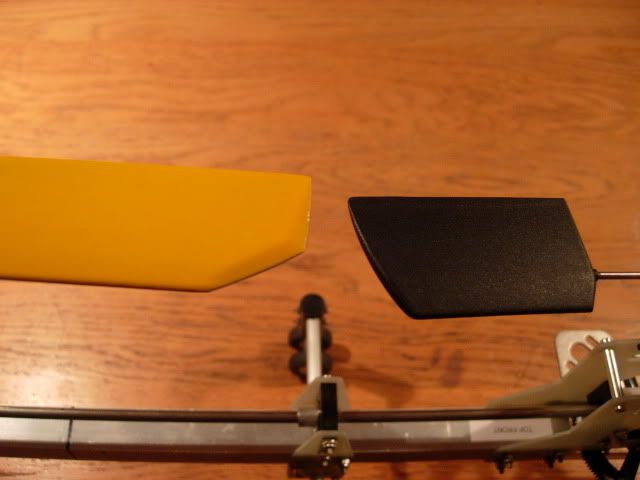
Het is niet veel maar voldoende zodat ze elkaar nooit kunnen raken.
Het resultaat na 5 echte bouwdagen:

En ter vergelijking ook even naast mijn HK-450 gezet

Groeten, Wilbert
Men neme een standaard Main rotor housing en plaatst de sesaw verkeerd om.
Vervolgens neemt men de mixing arms en zet de ballinks aan de andere kan van de arm en de arm zelf met de andere kant dan normaal tegen de sesaw.
Vervolgens neemt men een standaard washout base en draait die om.
De flens die nu boven aan de washout base zit is veel te groot en moet getrimd worden.
Na het trimmen ziet hij er zo uit: (Ja het is niet recht
Maar niet zo scheef als de foto doet vermoeden)
Als ik nu voldoende vrijheid heb tot de kop dan laat ik het zo. Als de rand toch nog te hoog is volgt nog een nabewerking. Dit onder het motto: Meer er af kan altijd nog
De washout controll arms worden normaal gemonteerd en draaien mee om met de washout base. Vervolgens worden de kunststof links naar beneden gedraaid.
Hiermee is de rechtsdraaiende kop linksdraaiend geworden.
Aangezien ik nu één kop heb met bladhouders en één zonder kon ik mooi kijken wat nu de afstand is tussen het Blad en de flybar paddle.
Het is niet veel maar voldoende zodat ze elkaar nooit kunnen raken.
Het resultaat na 5 echte bouwdagen:
En ter vergelijking ook even naast mijn HK-450 gezet
Groeten, Wilbert






 .
.
")

 )
)