Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Quadcopter 420mm: Homebuild
- Topicstarter R. Maas
- Startdatum
Kees, gelukt. De sensoren lijken nu wel juist te reageren. Vandaag weer even aan de elastiek.
edit: zojuist aan het elastiek, alles goed en werkend!!
iedereen dank voor de tips!!
Mooi man. Filmpje.

Heb vanmiddag in de achtertuin de maiden (zonder elastiek) met de quad gevlogen.
Vliegt erg stabiel en is makkelijker te besturen dan aan het elastiek. Alleen voor mijn gevoel reageert hij wat langzaam op de Throttle. Zeker in vergelijking met de heli.
Heb mijn Low Stick End Point op 130% staan, om Quad te kunnen armen. HI STICK staat op 116%. Range is dus erg groot.
Wat is de beste wijze om dat aan dat passen? Heeft MINTHROTTLE in de software daar effect op, of kan ik dit beter in de EXPO van mijn zender doen?
:twisted: Max
Vliegt erg stabiel en is makkelijker te besturen dan aan het elastiek. Alleen voor mijn gevoel reageert hij wat langzaam op de Throttle. Zeker in vergelijking met de heli.
Heb mijn Low Stick End Point op 130% staan, om Quad te kunnen armen. HI STICK staat op 116%. Range is dus erg groot.
Wat is de beste wijze om dat aan dat passen? Heeft MINTHROTTLE in de software daar effect op, of kan ik dit beter in de EXPO van mijn zender doen?
:twisted: Max
De eind punten kun je aanpassen, als je maar onder de 1100 en boven de 1900 blijft. Denk er aan dat als je dan de trim gebruikt de instellingen ook wijzigen, maar dit is voor throttle geen probleem omdat je hiervoor normaal geen trim gebruikt.
Je zou ook een throttle curve in je zender in kunnen stellen.
Rc Rate verhogen geeft ook een heel wat fellere reactie op alle stick bewegingen.
Ik denk als je de mintrottle verhoogd dat dit ook wel zal helpen, let wel op dat je niet te hoog gaat anders verdwijnt hij in ruimte.
Je zou ook een throttle curve in je zender in kunnen stellen.
Rc Rate verhogen geeft ook een heel wat fellere reactie op alle stick bewegingen.
Ik denk als je de mintrottle verhoogd dat dit ook wel zal helpen, let wel op dat je niet te hoog gaat anders verdwijnt hij in ruimte.
Heb met veel interesse dit stuk forum doorgelezen,mijn complementen.
Toch heb ik een vraag;het is bekend dat een kleine heli minder stabiel vliegt als een grote heli.
Waarom wordt bij de Quadcopter slechts een diagonaal aangehouden van 42 cm,waarom geen 60 of 80 cm,dunkt mij dat hij dan ook stabieler is.
Of heb ik het verkeerd,zeg het maar,alvast bedankt voor de komende reactie.
Toch heb ik een vraag;het is bekend dat een kleine heli minder stabiel vliegt als een grote heli.
Waarom wordt bij de Quadcopter slechts een diagonaal aangehouden van 42 cm,waarom geen 60 of 80 cm,dunkt mij dat hij dan ook stabieler is.
Of heb ik het verkeerd,zeg het maar,alvast bedankt voor de komende reactie.
De eind punten kun je aanpassen, als je maar onder de 1100 en boven de 1900 blijft. Denk er aan dat als je dan de trim gebruikt de instellingen ook wijzigen, maar dit is voor throttle geen probleem omdat je hiervoor normaal geen trim gebruikt.
Je zou ook een throttle curve in je zender in kunnen stellen.
Rc Rate verhogen geeft ook een heel wat fellere reactie op alle stick bewegingen.
Ik denk als je de mintrottle verhoogd dat dit ook wel zal helpen, let wel op dat je niet te hoog gaat anders verdwijnt hij in ruimte.
He Kees, bedankt voor de reactie/tips.

Heb vandaag eerst mijn throttle low stick eindpunt aangepast. Zit nu op 115% en heb dan nog een waarde van 1075 en kan bordje nog steeds armen.
Vervolgens ff lipo getest en quad reageert al een stuk beter op throttle. Volgende stap is high stick end point aanpassen.
In mijn Futaba 7C kan ik in vleigtuig mode geen throttle curve instellen. Alleen in heli mode.
Als laatste ga ik stoeien met de MINTHROTTLE. Je weet: "The sky is not the limit, the ground is:lol:."
:twisted: Max
Heb met veel interesse dit stuk forum doorgelezen,mijn complementen.
Toch heb ik een vraag;het is bekend dat een kleine heli minder stabiel vliegt als een grote heli.
Waarom wordt bij de Quadcopter slechts een diagonaal aangehouden van 42 cm,waarom geen 60 of 80 cm,dunkt mij dat hij dan ook stabieler is.
Of heb ik het verkeerd,zeg het maar,alvast bedankt voor de komende reactie.
He Maniac
Een kleine heli heeft meer last van de wind als een grote. Tevens reageert hij feller op stuurbewegingen. Volgens mij is dit ook zo bij een Quad, maar ik ben wat dat betreft echt een :n00b:.
Een kleine Quad zal meer last van de wind hebben maar door de kleinere armen zal de software sneller kunnen sturen. Net als bij een hefboom. Hoe langer de hefboom hoe meer afstand je moet overbruggen. Moet je dus bij stellen in de reactie van de software.
In de Quad van mijn broer 420 mm staan de PID waarden hoger als in de kleine (300 mm) van mij.
28-03-2012: Update
Hehe, eindelijk binnen, mijn Multiwiiboardje, heeft maar 2.5 maandjes geduurd, lekker snel toch ....

En ook de diverse aansluitsnoertjes zitten er zelfs bij.
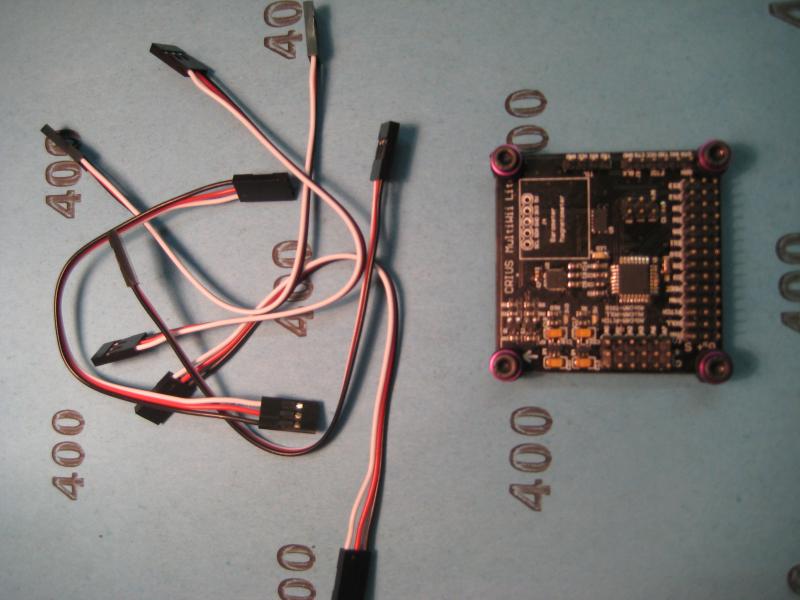
Zo, nu snel het boardje erop en testen, nu het nog goed weer is.
Basis instellingen neem ik over van het "geleende" madmax boardje, kijken of dit hetzelfde vliegpatroon geeft.
Hehe, eindelijk binnen, mijn Multiwiiboardje, heeft maar 2.5 maandjes geduurd, lekker snel toch ....
En ook de diverse aansluitsnoertjes zitten er zelfs bij.
Zo, nu snel het boardje erop en testen, nu het nog goed weer is.
Basis instellingen neem ik over van het "geleende" madmax boardje, kijken of dit hetzelfde vliegpatroon geeft.
Laatst bewerkt door een moderator:
28-03-2012: Update
Zo, nu snel het boardje erop en testen, nu het nog goed weer is.
Basis instellingen neem ik over van het "geleende" madmax boardje, kijken of dit hetzelfde vliegpatroon geeft.
Duurt wel erg lang!!! :lol: ;-)
Waar blijft het filmpje

")
:twisted: MAX
")

Hoi
Ik durf het bijna niet te vragen, maar.....
De quad vliegt behoorlijk goed, maar ik wil nog wat wijzigen in de software. Toen ik het MultiWII bordje kreeg stond de software er al op en hebben we alleen via de USB aansluiting en het programma MultiWiiConf-1.9 wat instellingen gewijzigd.
Nu is het mijn vraag of de software instellingen in het bordje gelijk zijn als in het bestandje MultiWiiConf_1_9.pde op mijn PC?
Of kan ik via Arduino-0023 de software in het bordje als een soort van backup opslaan op mijn PC?
In het scherm van Arduino kan ik wel een bestand open. Als ik kies voor MultiWii_1_9.pde (op de PC) dan wordt dat netjes geopend en kan ik naar het tabblad config.h. Daar kan ik dan wijzigen aanbrengen. Ik kan daarna met Upload waarschijnlijk de software op het bordje overbrengen.
Ik zie echter niet de mogelijkheid op iets te downloaden. Nu ben ik bang dat ik de instellingen in het bordje kwijt raak als ik vanaf de PC een Upload doe.
Hieronder ff een schermafdruk van Arduino en het bestand wat ik open op de PC.
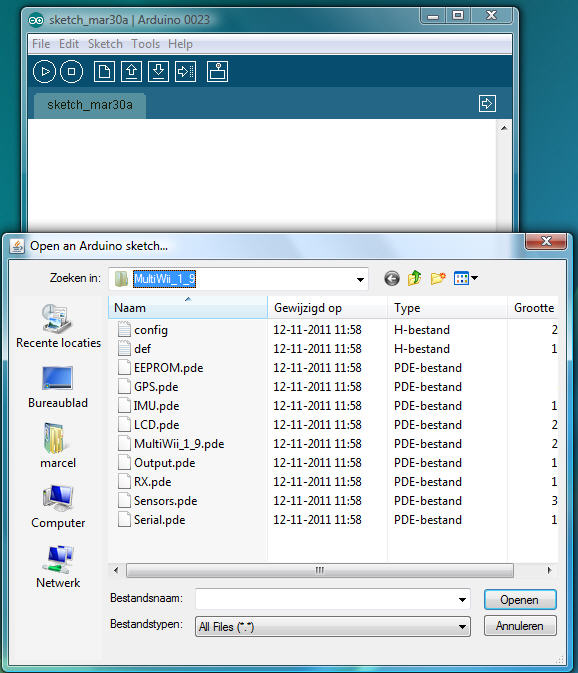
:evil: MAX
Ik durf het bijna niet te vragen, maar.....
De quad vliegt behoorlijk goed, maar ik wil nog wat wijzigen in de software. Toen ik het MultiWII bordje kreeg stond de software er al op en hebben we alleen via de USB aansluiting en het programma MultiWiiConf-1.9 wat instellingen gewijzigd.
Nu is het mijn vraag of de software instellingen in het bordje gelijk zijn als in het bestandje MultiWiiConf_1_9.pde op mijn PC?
Of kan ik via Arduino-0023 de software in het bordje als een soort van backup opslaan op mijn PC?
In het scherm van Arduino kan ik wel een bestand open. Als ik kies voor MultiWii_1_9.pde (op de PC) dan wordt dat netjes geopend en kan ik naar het tabblad config.h. Daar kan ik dan wijzigen aanbrengen. Ik kan daarna met Upload waarschijnlijk de software op het bordje overbrengen.
Ik zie echter niet de mogelijkheid op iets te downloaden. Nu ben ik bang dat ik de instellingen in het bordje kwijt raak als ik vanaf de PC een Upload doe.
Hieronder ff een schermafdruk van Arduino en het bestand wat ik open op de PC.
:evil: MAX
Laatst bewerkt door een moderator:
Micropuller
Forum veteraan
Downloaden vanaf een arduino gaat inderdaad niet lukken.
Downloaden vanaf een arduino gaat inderdaad niet lukken.
Oke, Bedankt voor de snelle reactie,
maar zijn de software instellingen in het bordje gelijk aan het bestand in mijn PC, bijv. omdat het gekoppeld is geweest aan de pc via de USB poort?
Max
Micropuller
Forum veteraan
Ik heb (nog) niet gewerkt met de GUI, maar als ik het goed begrepen heb, schrijft deze de instellingen weg naar de Arduino. Nu weet ik niet of de GUI ook de instellingen van de arduino kan lezen als je deze aansluit op de usb poort (ik denk het wel)
(Edit: zie net dat dat zou moeten kunnen door op "Read" te klikken)
Je zou dan een screenshot kunnen maken en de instellingen net zo weer kunnen inprogrammeren als je versie 1.9 op de arduino hebt gezet.
(Edit: zie net dat dat zou moeten kunnen door op "Read" te klikken)
Je zou dan een screenshot kunnen maken en de instellingen net zo weer kunnen inprogrammeren als je versie 1.9 op de arduino hebt gezet.
Jou bordje was al voor geprogrammeerd dus als je nu de standaard file upload ben je inderdaad alle instellingen kwijt.
Dus zul je voor dat je de nieuwe software upload eerst de config.H file moeten wijzigen naar jou behoefte.
Als je bij de zelfde versie blijft zullen je PID instellingen in de Gui ongewijzigd blijven, ga je bijvoorbeeld van 1.9 terug naar 1.8 dan word de Eprom overschreven en zullen de PID instellingen weer naar de standaard instelling hersteld worden.
Als je toch iets wilt wijzigen zou ik gelijk overgaan naar MultiWii 2.0 vliegt weer een stukje stabieler en nog vele extra's. Hiervoor moet je wel Arduino 1.0 gebruiken.
Lees ook even de bijgevoegde tekst file.
En vraag maar raak hoor.
Dus zul je voor dat je de nieuwe software upload eerst de config.H file moeten wijzigen naar jou behoefte.
Als je bij de zelfde versie blijft zullen je PID instellingen in de Gui ongewijzigd blijven, ga je bijvoorbeeld van 1.9 terug naar 1.8 dan word de Eprom overschreven en zullen de PID instellingen weer naar de standaard instelling hersteld worden.
Als je toch iets wilt wijzigen zou ik gelijk overgaan naar MultiWii 2.0 vliegt weer een stukje stabieler en nog vele extra's. Hiervoor moet je wel Arduino 1.0 gebruiken.
Lees ook even de bijgevoegde tekst file.
En vraag maar raak hoor.