Bedankt voor de complimenten, de RC die van mijn vorige boot hier overgebouwd word vaard op de schijnbare windrichting die ik met mijn zender vanaf de wal kan wijzigen, ook kan de aanstroomhoek tenopzichte van de schijnbare wind met RC gewijzigd worden stand van de zeilen, achterstag spanning en schoot lossen geheel automatis.
In eerste instansie gaat de GPS de zeilboot terug naar start posietie brengen bij het wegvallen of buiten bereik geraken van de zender. Wanneer deze recht in de wind ligd moet natuurlijk de beste koers gekozen worden en telkens overstag tot start punt
Denk dit te doen met bij start de GPS posietie te onhouden .
Nu blijfd het schip gewoon een rondje varen bij uitvallen van de zender.
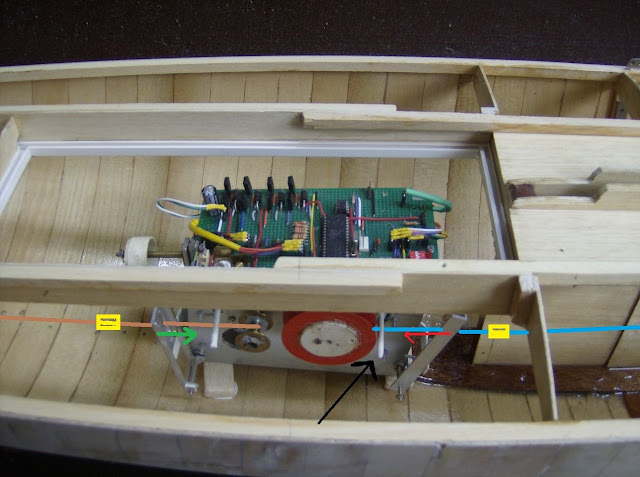
Zwarte peil voeler die de lijnspanning controleerd, wanneer deze naar omlaag vald word een foto sensor afgedekt deze beled dat de winch de schoot kan vieren als er geen spanning op staat
Blauwe lijn schoot
Geel stop eindloop bij het halen van de schoot
Rode peil beweging eindloop , deze dekt een foto sensor af en stopt het halen van de schoot.
Links idem voor het achterstag bruine lijn
Witte stukje pvc pijp (32 mmà links is de hellings sensor
Nog meer info ? op mijn blog
ISOLA2: augustus 2008

")
 dat ik het niet meer heb gedaan.
dat ik het niet meer heb gedaan.



") moet uiteindelijk een volledig autonoom schip worden met compas en gps .
moet uiteindelijk een volledig autonoom schip worden met compas en gps .

 is het de bedoeling dat je zelf een route invoert en dat de boot zelf bepaalt aan de hand van de windrichting welke route hij precies vaart?
is het de bedoeling dat je zelf een route invoert en dat de boot zelf bepaalt aan de hand van de windrichting welke route hij precies vaart?