.... nee dat is helemaal niet vreemd.... dat is JUIST
wat hij doet in HH....
Rate gyro, de naam zegt het al: hij corrigeert naar RATIO van de draaisnelheid, niet meer niet minder.
Met de gain verander je TWEE dingen: de respons van de gyro (dus hoe hard de gyro corrigeert op een gegeven draaisnelheid) en tegelijk de grootte van de directe stuurwerking.
Dit is gedaan, omdat als je gain verhoogt, de gyro harder tegenstuurt, en er dus bij te hoge gain niets meer van je oorspronkelijke stuuruitslag overblijft.
Bij modernere gyro's zit daar vaak nog wat meer aan algoritmes tussen die inderdaad o.a. rekening houden met wat je met je stick aan het doen bent op dat moment, maar in de basis is dat zo.
Je moet dan ook niet gek kijken, dat
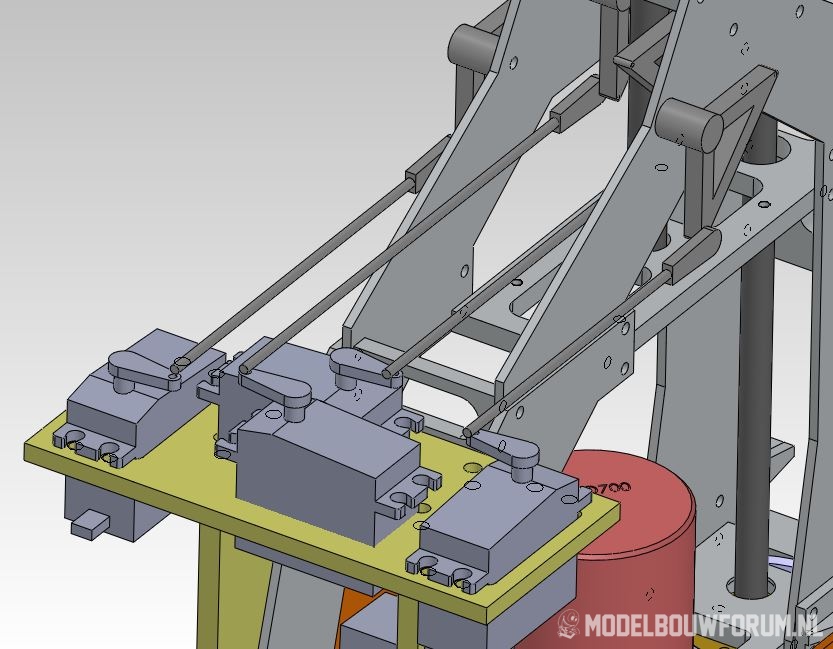
op de werkbank, in rate mode de hekrotor al bij halve stick "in de hoek staat", en dat moet je dus NIET gaan compenseren met zenderinstellingen. Als je namelijk de rate gain verandert, zul je zien dat het punt waarbij de hekrotor in de hoek staat, óók verschuift....
Wat ik normaliter doe, is éérst de servo rechtsstreeks op de ontvanger aansluiten, en de boel mechanisch goed zetten. 100% EPA, moet de hekrotor precise tot aan de mechanische aanslagen laten komen, maar hij mag NIET blokkeren.
Daarna zet ik de gyro er tussen, en stel de end points in de gyro in (als dat nodig blijkt tenminste, meestal is dat in één keer goed)
Daarna ga ik vliegen, en stel de gain in als volgt: als ik stuur, en ik laat de stick los, moet de heli soepel en direct ophouden met draaien, zonder een "zweepslag(je)" aan het eind.
Dat doe ik (net als jij) met de schuif in de hoek, door de EPA van het gain kanaal te reduceren tot het goed is.
Daarna stel ik met de EPA op de rudderfunctie in de zender in dat de heli prettig reageert (dat hij niet te agressief stuurt, en niet te traag). Indien er een HH aanwezig is, stel ik die meestal niet eens in: ik gebruik hem toch nooit, en de-activeer die functie meestal.
Aangezien ik toch nooit HH gebruik, stel ik vervolgens ook ReVo in, maakt de heli een stuk prettiger in de omgang.
Of die manier van instellen te combineren is met de rest van de instellingen van jouw BeastX, dat weet ik niet.
")