En nog een FPVer erbij!
Heel interessante blog...
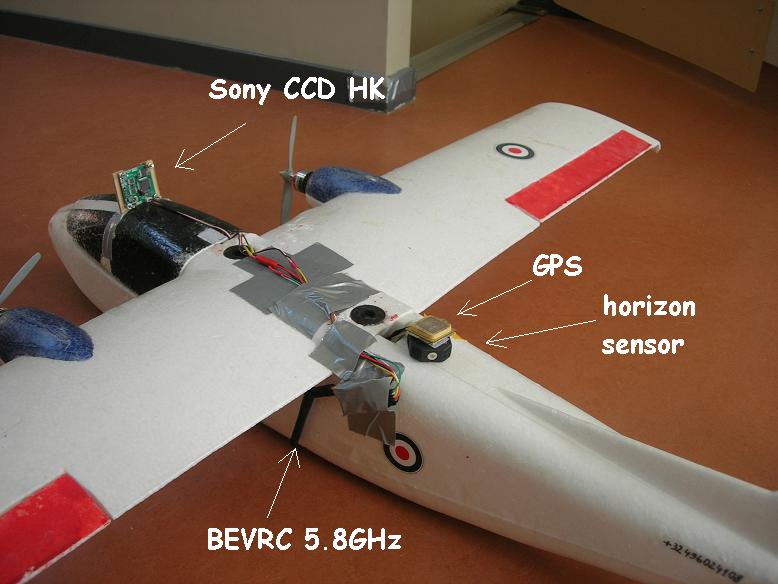
Ik ben ook net begonnen met FPV en veel elementen in m'n setup zijn dezelfde. Ik gebruik een voyager, lijkt erg op twinstar, alleen wat plomper. Ook Sony CCD en BEVRC, wel op 5.8 GHz want mijn RC is op 2.4 GHz.
Ik ben wel redelijk goedkoop geweest wat het brilletje betreft: dat $70 ding van Turnigy in HK. Maar de kwaliteit is lang niet slecht. Beeld is beter dan FlyCamOne, zeker wat intensiteits controle betreft. Nog goedkoper geweest voor de OSD: namelijk geen.
De eerste vluchten heb ik 3rd person gevlogen, met de bril op de neus van een maat, om de antenne goed te krijgen. Eerst antenne in het midden van boven gezet, naar omhoog. Werkte slecht, soms viel het beeld 2s weg, terwijl ik minder dan 200 m ver zat. Daarna dwars over de vleugel (horizontaal, ook base station horizontaal natuurlijk). Werkte een stuk beter. Dan zelf gevlogen. Heel anders dan ik gedacht had. Ik had heel de tijd de reflex mijn vliegtuig te willen zien, uit gewoonte. Het ging ook minder snel dan ik verwacht had en na even geraakte ik gedesorienteerd. Dan een stukje 3rd person gevlogen en 1st person geland. Hartslag 160 en vol zweet.
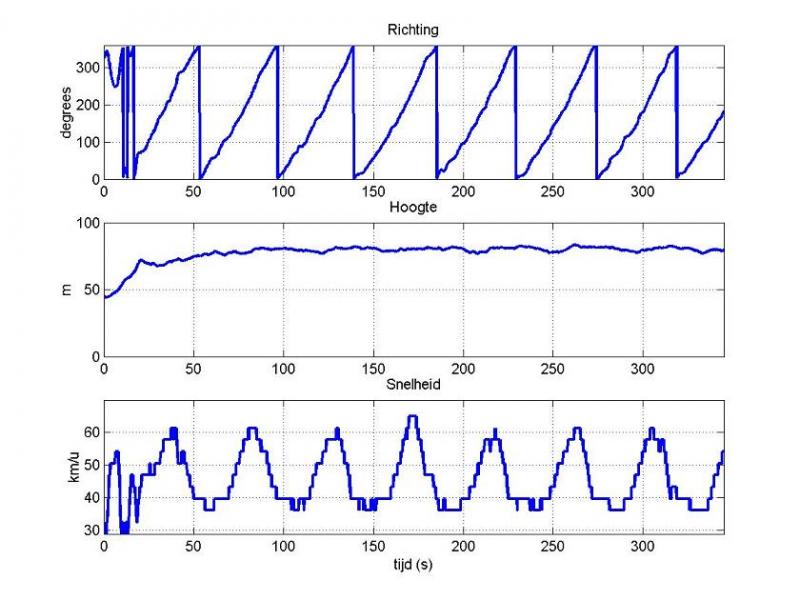
Om verloren vliegen te voorkomen heb ik dan mijn autopiloot proberen reviven. Die moet het vliegtuig terugbrengen als ik niet meer weet waar ik zit, of RC niet meer goed werkt of zo. Ik had enkele jaren geleden een PCBtje gemaakt om de voyager automatisch te laten vliegen op GPS met stabilisatie met horizon sensor. Afgelopen zomer deed de Voyager loopings en rollen met de autopiloot:
[URL="
- Automatic Plane - Looping and Roll from Cockpit Camera!![/URL]
Na de geboorte van mijn zoontje heb ik wat gas terug genomen en even gestopt met tijdrovende speciallekes, totdat ik de FPV video zag van die Oostenrijker in New York. Direct dit "instap"-FPV systeem besteld.
Dus. Vorig weekend terug met de autopiloot en FPV gaan vliegen. De bedoeling was automatisch op te stijgen en dan het vliegtuig boven mijn hoofd te laten cirkelen, zodat ik in alle rust kon wennen aan het beeld en hem kon overnemen als ik er klaar voor was. Opstijgen ging prima, maar dan zette het vliegtuig koers naar Honolulu. Bug in de code. Gelukkig had ik het op tijd door en heb ik hem alsnog manueel kunnen nemen en laten terugkeren. Er stond eigenlijk veel te veel wind voor onervaren FPVer (20 km/u volgens mijn data log), dus liet ik mijn broer kijken terwijl ik wat vloog. Beeld was nu perfect en heel stabiel. Ik had de antenne gezet zoals in de foto, en dat lijkt de beste plaats te zijn.
Enfin, ik heb nu de bug in de software opgelost en kijk uit naar de volgende vlucht.
Hoe belangrijk is een OSD volgens jullie?
") , wat zal dat inderdaad een verschrikkelijk goed gevoel geven.
, wat zal dat inderdaad een verschrikkelijk goed gevoel geven. Wedden?
Wedden? )
) LOL!
LOL!